 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFGS-SLAM: Fourier-based Gaussian Splatting for Real-time SLAM with Sparse and Dense Map Fusion
Mar 03, 2025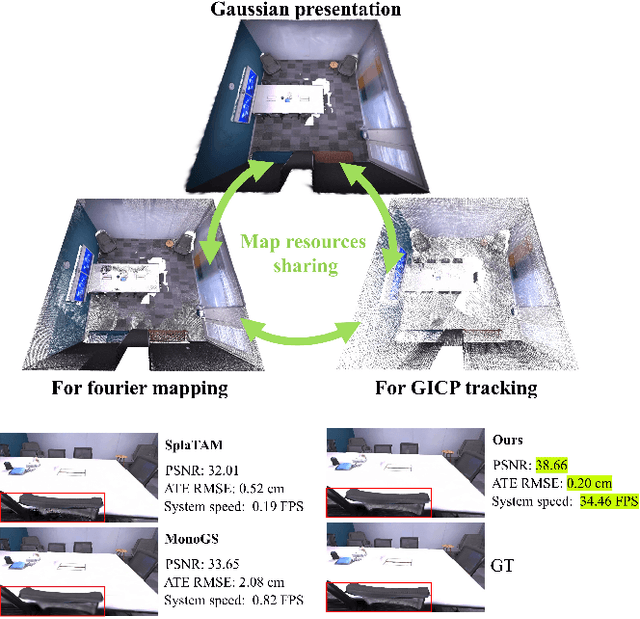
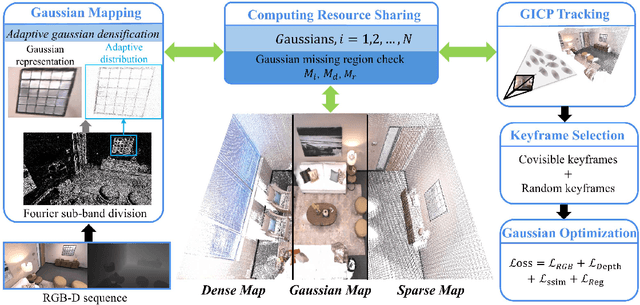
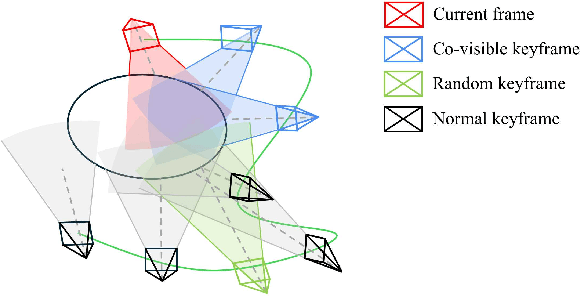
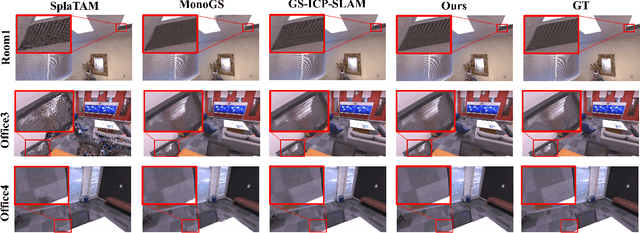
3D gaussian splatting has advanced simultaneous localization and mapping (SLAM) technology by enabling real-time positioning and the construction of high-fidelity maps. However, the uncertainty in gaussian position and initialization parameters introduces challenges, often requiring extensive iterative convergence and resulting in redundant or insufficient gaussian representations. To address this, we introduce a novel adaptive densification method based on Fourier frequency domain analysis to establish gaussian priors for rapid convergence. Additionally, we propose constructing independent and unified sparse and dense maps, where a sparse map supports efficient tracking via Generalized Iterative Closest Point (GICP) and a dense map creates high-fidelity visual representations. This is the first SLAM system leveraging frequency domain analysis to achieve high-quality gaussian mapping in real-time. Experimental results demonstrate an average frame rate of 36 FPS on Replica and TUM RGB-D datasets, achieving competitive accuracy in both localization and mapping.
DeepHMap++: Combined Projection Grouping and Correspondence Learning for Full DoF Pose Estimation
Apr 29, 2019



In recent years, estimating the 6D pose of object instances with convolutional neural network (CNN) has received considerable attention. Depending on whether intermediate cues are used, the relevant literature can be roughly divided into two broad categories: direct methods and two stage pipelines. For the latter, intermediate cues, such as 3D object coordinates, semantic keypoints, or virtual control points instead of pose parameters are regressed by CNN in the first stage. Object pose can then be solved by correspondence constraints constructed with these intermediate cues. In this paper, we focus on the postprocessing of a two-stage pipeline and propose to combine two learning concepts for estimating object pose under challenging scenes: projection grouping on one side, and correspondence learning on the other. We firstly employ a local patch based method to predict projection heatmaps which denote the confidence distribution of projection of 3D bounding box's corners. A projection grouping module is then proposed to remove redundant local maxima from each layer of heatmaps. Instead of directly feeding 2D-3D correspondences to the perspective-n-point (PnP) algorithm, multiple correspondence hypotheses are sampled from local maxima and its corresponding neighborhood and ranked by a correspondence-evaluation network. Finally, correspondences with higher confidence are selected to determine object pose. Extensive experiments on three public datasets demonstrate that the proposed framework outperforms several state of the art methods.