 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnsemble diverse hypotheses and knowledge distillation for unsupervised cross-subject adaptation
Paper and Code
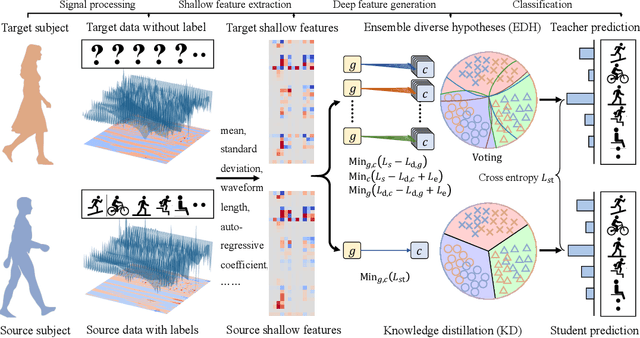
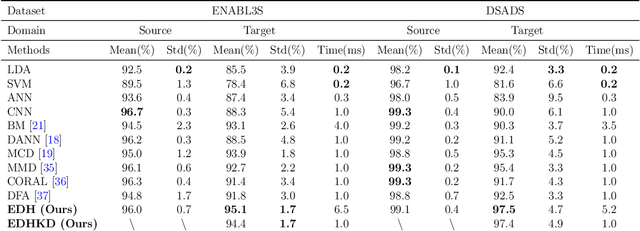
Recognizing human locomotion intent and activities is important for controlling the wearable robots while walking in complex environments. However, human-robot interface signals are usually user-dependent, which causes that the classifier trained on source subjects performs poorly on new subjects. To address this issue, this paper designs the ensemble diverse hypotheses and knowledge distillation (EDHKD) method to realize unsupervised cross-subject adaptation. EDH mitigates the divergence between labeled data of source subjects and unlabeled data of target subjects to accurately classify the locomotion modes of target subjects without labeling data. Compared to previous domain adaptation methods based on the single learner, which may only learn a subset of features from input signals, EDH can learn diverse features by incorporating multiple diverse feature generators and thus increases the accuracy and decreases the variance of classifying target data, but it sacrifices the efficiency. To solve this problem, EDHKD (student) distills the knowledge from the EDH (teacher) to a single network to remain efficient and accurate. The performance of the EDHKD is theoretically proved and experimentally validated on a 2D moon dataset and two public human locomotion datasets. Experimental results show that the EDHKD outperforms all other methods. The EDHKD can classify target data with 96.9%, 94.4%, and 97.4% average accuracy on the above three datasets with a short computing time (1 ms). Compared to a benchmark (BM) method, the EDHKD increases 1.3% and 7.1% average accuracy for classifying the locomotion modes of target subjects. The EDHKD also stabilizes the learning curves. Therefore, the EDHKD is significant for increasing the generalization ability and efficiency of the human intent prediction and human activity recognition system, which will improve human-robot interactions.