 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeD3PRefiner: A Diffusion-based Denoise Method for 3D Human Pose Refinement
Jan 08, 2024Three-dimensional (3D) human pose estimation using a monocular camera has gained increasing attention due to its ease of implementation and the abundance of data available from daily life. However, owing to the inherent depth ambiguity in images, the accuracy of existing monocular camera-based 3D pose estimation methods remains unsatisfactory, and the estimated 3D poses usually include much noise. By observing the histogram of this noise, we find each dimension of the noise follows a certain distribution, which indicates the possibility for a neural network to learn the mapping between noisy poses and ground truth poses. In this work, in order to obtain more accurate 3D poses, a Diffusion-based 3D Pose Refiner (D3PRefiner) is proposed to refine the output of any existing 3D pose estimator. We first introduce a conditional multivariate Gaussian distribution to model the distribution of noisy 3D poses, using paired 2D poses and noisy 3D poses as conditions to achieve greater accuracy. Additionally, we leverage the architecture of current diffusion models to convert the distribution of noisy 3D poses into ground truth 3D poses. To evaluate the effectiveness of the proposed method, two state-of-the-art sequence-to-sequence 3D pose estimators are used as basic 3D pose estimation models, and the proposed method is evaluated on different types of 2D poses and different lengths of the input sequence. Experimental results demonstrate the proposed architecture can significantly improve the performance of current sequence-to-sequence 3D pose estimators, with a reduction of at least 10.3% in the mean per joint position error (MPJPE) and at least 11.0% in the Procrustes MPJPE (P-MPJPE).
Design, Modelling, and Control of a Reconfigurable Rotary Series Elastic Actuator with Nonlinear Stiffness for Assistive Robots
May 28, 2022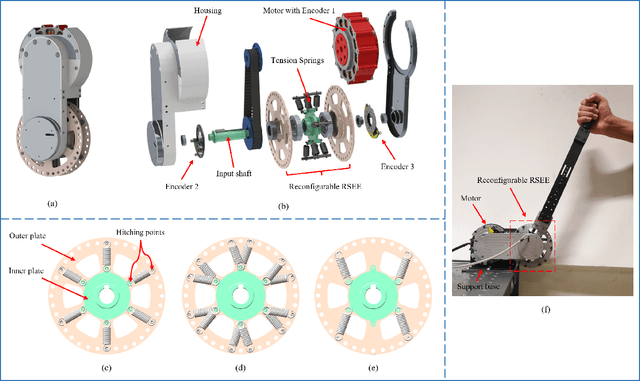
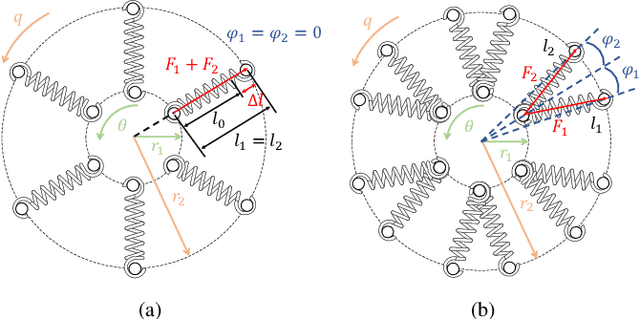
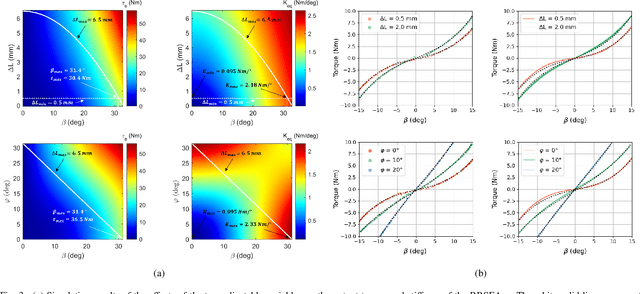
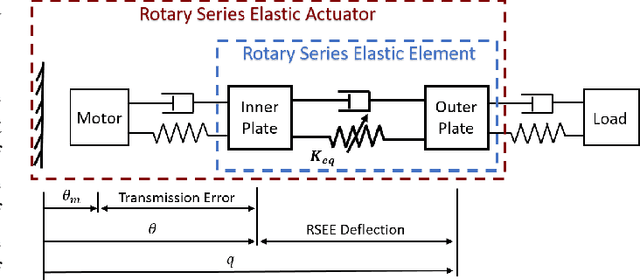
In assistive robots, compliant actuator is a key component in establishing safe and satisfactory physical human-robot interaction (pHRI). The performance of compliant actuators largely depends on the stiffness of the elastic element. Generally, low stiffness is desirable to achieve low impedance, high fidelity of force control and safe pHRI, while high stiffness is required to ensure sufficient force bandwidth and output force. These requirements, however, are contradictory and often vary according to different tasks and conditions. In order to address the contradiction of stiffness selection and improve adaptability to different applications, we develop a reconfigurable rotary series elastic actuator with nonlinear stiffness (RRSEAns) for assistive robots. In this paper, an accurate model of the reconfigurable rotary series elastic element (RSEE) is presented and the adjusting principles are investigated, followed by detailed analysis and experimental validation. The RRSEAns can provide a wide range of stiffness from 0.095 Nm/deg to 2.33 Nm/deg, and different stiffness profiles can be yielded with respect to different configuration of the reconfigurable RSEE. The overall performance of the RRSEAns is verified by experiments on frequency response, torque control and pHRI, which is adequate for most applications in assistive robots. Specifically, the root-mean-square (RMS) error of the interaction torque results as low as 0.07 Nm in transparent/human-in-charge mode, demonstrating the advantages of the RRSEAns in pHRI.