 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNP-LoRA: Null Space Projection Unifies Subject and Style in LoRA Fusion
Nov 14, 2025Low-Rank Adaptation (LoRA) fusion has emerged as a key technique for reusing and composing learned subject and style representations for controllable generation without costly retraining. However, existing methods rely on weight-based merging, where one LoRA often dominates the other, leading to interference and degraded fidelity. This interference is structural: separately trained LoRAs occupy low-rank high-dimensional subspaces, leading to non-orthogonal and overlapping representations. In this work, we analyze the internal structure of LoRAs and find their generative behavior is dominated by a few principal directions in the low-rank subspace, which should remain free from interference during fusion. To achieve this, we propose Null Space Projection LoRA (NP-LoRA), a projection-based framework for LoRA fusion that enforces subspace separation to prevent structural interference among principal directions. Specifically, we first extract principal style directions via singular value decomposition (SVD) and then project the subject LoRA into its orthogonal null space. Furthermore, we introduce a soft projection mechanism that enables smooth control over the trade-off between subject fidelity and style consistency. Experiments show NP-LoRA consistently improves fusion quality over strong baselines (e.g., DINO and CLIP-based metrics, with human and LLM preference scores), and applies broadly across backbones and LoRA pairs without retraining.
Fast Hip Joint Moment Estimation with A General Moment Feature Generation Method
Oct 01, 2024The hip joint moment during walking is a crucial basis for hip exoskeleton control. Compared to generating assistive torque profiles based on gait estimation, estimating hip joint moment directly using hip joint angles offers advantages such as simplified sensing and adaptability to variable walking speeds. Existing methods that directly estimate moment from hip joint angles are mainly used for offline biomechanical estimation. However, they suffer from long computation time and lack of personalization, rendering them unsuitable for personalized control of hip exoskeletons. To address these challenges, this paper proposes a fast hip joint moment estimation method based on generalized moment features (GMF). The method first employs a GMF generator to learn a feature representation of joint moment, namely the proposed GMF, which is independent of individual differences. Subsequently, a GRU-based neural network with fast computational performance is trained to learn the mapping from the joint kinematics to the GMF. Finally, the predicted GMF is decoded into the joint moment with a GMF decoder. The joint estimation model is trained and tested on a dataset comprising 20 subjects under 28 walking speed conditions. Results show that the proposed method achieves a root mean square error of 0.1180 $\pm$ 0.0021 Nm/kg for subjects in test dataset, and the computation time per estimation using the employed GRU-based estimator is 1.3420 $\pm$ 0.0031 ms, significantly faster than mainstream neural network architectures, while maintaining comparable network accuracy. These promising results demonstrate that the proposed method enhances the accuracy and computational speed of joint moment estimation neural networks, with potential for guiding exoskeleton control.
Enhancing Prosthetic Safety and Environmental Adaptability: A Visual-Inertial Prosthesis Motion Estimation Approach on Uneven Terrains
Apr 29, 2024



Environment awareness is crucial for enhancing walking safety and stability of amputee wearing powered prosthesis when crossing uneven terrains such as stairs and obstacles. However, existing environmental perception systems for prosthesis only provide terrain types and corresponding parameters, which fails to prevent potential collisions when crossing uneven terrains and may lead to falls and other severe consequences. In this paper, a visual-inertial motion estimation approach is proposed for prosthesis to perceive its movement and the changes of spatial relationship between the prosthesis and uneven terrain when traversing them. To achieve this, we estimate the knee motion by utilizing a depth camera to perceive the environment and align feature points extracted from stairs and obstacles. Subsequently, an error-state Kalman filter is incorporated to fuse the inertial data into visual estimations to reduce the feature extraction error and obtain a more robust estimation. The motion of prosthetic joint and toe are derived using the prosthesis model parameters. Experiment conducted on our collected dataset and stair walking trials with a powered prosthesis shows that the proposed method can accurately tracking the motion of the human leg and prosthesis with an average root-mean-square error of toe trajectory less than 5 cm. The proposed method is expected to enable the environmental adaptive control for prosthesis, thereby enhancing amputee's safety and mobility in uneven terrains.
Learning Task-adaptive Quasi-stiffness Control for A Powered Transfemoral Prosthesis
Nov 25, 2023While significant advancements have been made in the mechanical and task-specific controller designs of powered transfemoral prostheses, developing a task-adaptive control framework that generalizes across various locomotion modes and terrain conditions remains an open problem. This study proposes a task-adaptive learning quasi-stiffness control framework for powered prostheses that generalizes across tasks, including the torque-angle relationship reconstruction part and the quasi-stiffness controller design part. Quasi-stiffness is defined as the slope of the human joint's torque-angle relationship. To accurately obtain the torque-angle relationship in a new task, a Gaussian Process Regression (GPR) model is introduced to predict the target features of the human joint's angle and torque in the task. Then a Kernelized Movement Primitives (KMP) is employed to reconstruct the torque-angle relationship of a new task from multiple human demonstrations and estimated target features. Based on the torque-angle relationship of the new task, a quasi-stiffness control approach is designed for a powered prosthesis. Finally, the proposed framework is validated through practical examples, including varying speed and incline walking tasks. The proposed framework has the potential to expand to variable walking tasks in daily life for the transfemoral amputees.
SLLEN: Semantic-aware Low-light Image Enhancement Network
Nov 21, 2022How to effectively explore semantic feature is vital for low-light image enhancement (LLE). Existing methods usually utilize the semantic feature that is only drawn from the semantic map produced by high-level semantic segmentation network (SSN). However, if the semantic map is not accurately estimated, it would affect the high-level semantic feature (HSF) extraction, which accordingly interferes with LLE. In this paper, we develop a simple yet effective two-branch semantic-aware LLE network (SLLEN) that neatly integrates the random intermediate embedding feature (IEF) (i.e., the information extracted from the intermediate layer of semantic segmentation network) together with the HSF into a unified framework for better LLE. Specifically, for one branch, we utilize an attention mechanism to integrate HSF into low-level feature. For the other branch, we extract IEF to guide the adjustment of low-level feature using nonlinear transformation manner. Finally, semantic-aware features obtained from two branches are fused and decoded for image enhancement. It is worth mentioning that IEF has some randomness compared to HSF despite their similarity on semantic characteristics, thus its introduction can allow network to learn more possibilities by leveraging the latent relationships between the low-level feature and semantic feature, just like the famous saying "God rolls the dice" in Physics Nobel Prize 2022. Comparisons between the proposed SLLEN and other state-of-the-art techniques demonstrate the superiority of SLLEN with respect to LLE quality over all the comparable alternatives.
A Piecewise Monotonic Gait Phase Estimation Model for Controlling a Powered Transfemoral Prosthesis in Various Locomotion Modes
Jul 25, 2022
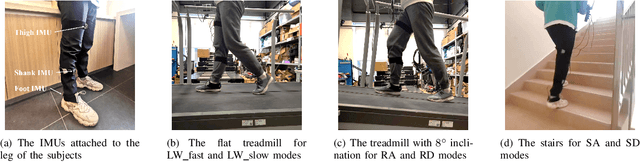
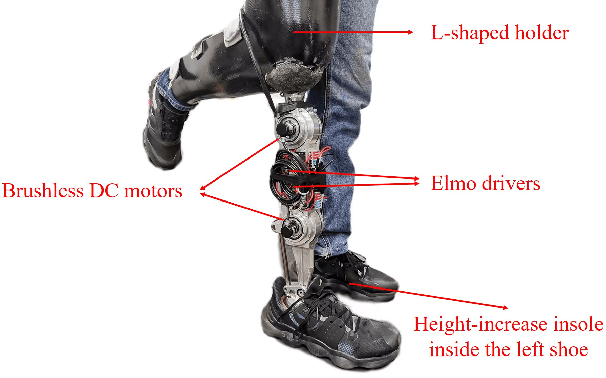
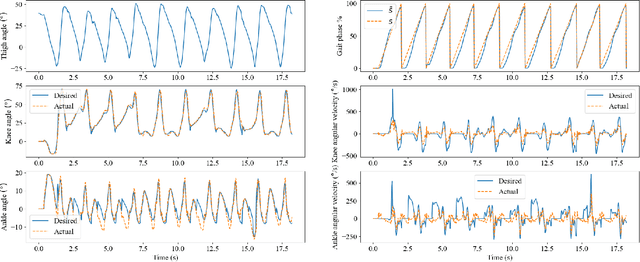
Gait phase-based control is a trending research topic for walking-aid robots, especially robotic lower-limb prostheses. Gait phase estimation is a challenge for gait phase-based control. Previous researches used the integration or the differential of the human's thigh angle to estimate the gait phase, but accumulative measurement errors and noises can affect the estimation results. In this paper, a more robust gait phase estimation method is proposed using a unified form of piecewise monotonic gait phase-thigh angle models for various locomotion modes. The gait phase is estimated from only the thigh angle, which is a stable variable and avoids phase drifting. A Kalman filter-based smoother is designed to further suppress the mutations of the estimated gait phase. Based on the proposed gait phase estimation method, a gait phase-based joint angle tracking controller is designed for a transfemoral prosthesis. The proposed gait estimation method, the gait phase smoother, and the controller are evaluated through offline analysis on walking data in various locomotion modes. And the real-time performance of the gait phase-based controller is validated in an experiment on the transfemoral prosthesis.