 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRADAR: Revealing Asymmetric Development of Abilities in MLLM Pre-training
Feb 13, 2026Pre-trained Multi-modal Large Language Models (MLLMs) provide a knowledge-rich foundation for post-training by leveraging their inherent perception and reasoning capabilities to solve complex tasks. However, the lack of an efficient evaluation framework impedes the diagnosis of their performance bottlenecks. Current evaluation primarily relies on testing after supervised fine-tuning, which introduces laborious additional training and autoregressive decoding costs. Meanwhile, common pre-training metrics cannot quantify a model's perception and reasoning abilities in a disentangled manner. Furthermore, existing evaluation benchmarks are typically limited in scale or misaligned with pre-training objectives. Thus, we propose RADAR, an efficient ability-centric evaluation framework for Revealing Asymmetric Development of Abilities in MLLM pRe-training. RADAR involves two key components: (1) Soft Discrimination Score, a novel metric for robustly tracking ability development without fine-tuning, based on quantifying nuanced gradations of the model preference for the correct answer over distractors; and (2) Multi-Modal Mixture Benchmark, a new 15K+ sample benchmark for comprehensively evaluating pre-trained MLLMs' perception and reasoning abilities in a 0-shot manner, where we unify authoritative benchmark datasets and carefully collect new datasets, extending the evaluation scope and addressing the critical gaps in current benchmarks. With RADAR, we comprehensively reveal the asymmetric development of perceptual and reasoning capabilities in pretrained MLLMs across diverse factors, including data volume, model size, and pretraining strategy. Our RADAR underscores the need for a decomposed perspective on pre-training ability bottlenecks, informing targeted interventions to advance MLLMs efficiently. Our code is publicly available at https://github.com/Nieysh/RADAR.
MineAnyBuild: Benchmarking Spatial Planning for Open-world AI Agents
May 26, 2025Spatial Planning is a crucial part in the field of spatial intelligence, which requires the understanding and planning about object arrangements in space perspective. AI agents with the spatial planning ability can better adapt to various real-world applications, including robotic manipulation, automatic assembly, urban planning etc. Recent works have attempted to construct benchmarks for evaluating the spatial intelligence of Multimodal Large Language Models (MLLMs). Nevertheless, these benchmarks primarily focus on spatial reasoning based on typical Visual Question-Answering (VQA) forms, which suffers from the gap between abstract spatial understanding and concrete task execution. In this work, we take a step further to build a comprehensive benchmark called MineAnyBuild, aiming to evaluate the spatial planning ability of open-world AI agents in the Minecraft game. Specifically, MineAnyBuild requires an agent to generate executable architecture building plans based on the given multi-modal human instructions. It involves 4,000 curated spatial planning tasks and also provides a paradigm for infinitely expandable data collection by utilizing rich player-generated content. MineAnyBuild evaluates spatial planning through four core supporting dimensions: spatial understanding, spatial reasoning, creativity, and spatial commonsense. Based on MineAnyBuild, we perform a comprehensive evaluation for existing MLLM-based agents, revealing the severe limitations but enormous potential in their spatial planning abilities. We believe our MineAnyBuild will open new avenues for the evaluation of spatial intelligence and help promote further development for open-world AI agents capable of spatial planning.
Can Atomic Step Decomposition Enhance the Self-structured Reasoning of Multimodal Large Models?
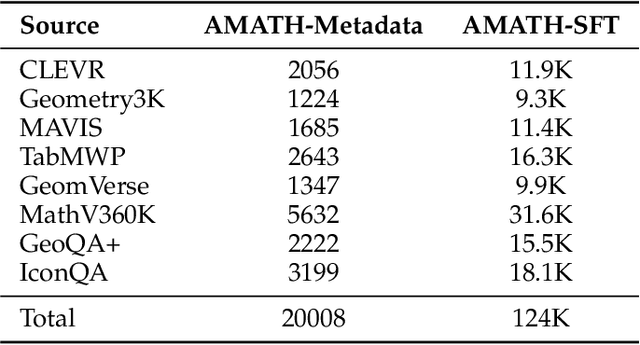
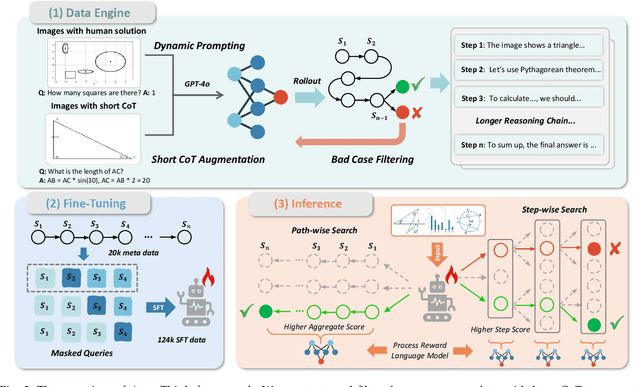
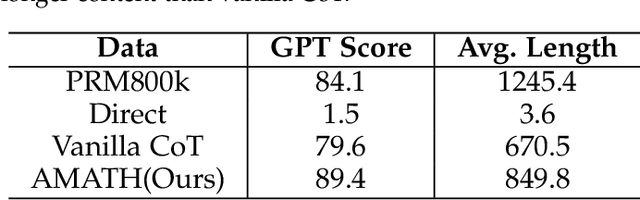
Mar 08, 2025In this paper, we address the challenging task of multimodal mathematical reasoning by incorporating the ability of "slow thinking" into multimodal large language models (MLLMs). Our core idea is that different levels of reasoning abilities can be combined dynamically to tackle questions with different complexity. To this end, we propose a paradigm of Self-structured Chain of Thought (SCoT), which is composed of minimal semantic atomic steps. Different from existing methods that rely on structured templates or free-form paradigms, our method can not only generate cognitive CoT structures for various complex tasks but also mitigates the phenomenon of overthinking. To introduce structured reasoning capabilities into visual understanding models, we further design a novel AtomThink framework with four key modules, including (i) a data engine to generate high-quality multimodal reasoning paths; (ii) a supervised fine-tuning process with serialized inference data; (iii) a policy-guided multi-turn inference method; and (iv) an atomic capability metric to evaluate the single step utilization rate. We conduct extensive experiments to show that the proposed AtomThink significantly improves the performance of baseline MLLMs, achieving more than 10\% average accuracy gains on MathVista and MathVerse. Compared to state-of-the-art structured CoT approaches, our method not only achieves higher accuracy but also improves data utilization by 5 times and boosts inference efficiency by 85.3\%. Our code is now public available in https://github.com/Quinn777/AtomThink.
AtomThink: A Slow Thinking Framework for Multimodal Mathematical Reasoning
Nov 18, 2024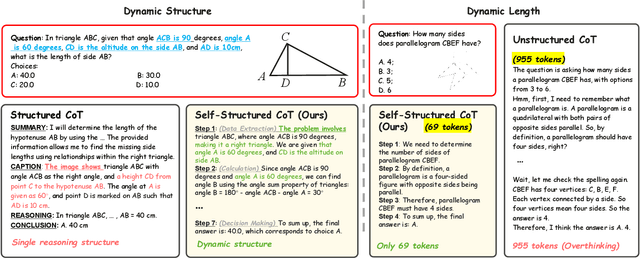
In this paper, we address the challenging task of multimodal mathematical reasoning by incorporating the ability of ``slow thinking" into multimodal large language models (MLLMs). Contrary to existing methods that rely on direct or fast thinking, our key idea is to construct long chains of thought (CoT) consisting of atomic actions in a step-by-step manner, guiding MLLMs to perform complex reasoning. To this end, we design a novel AtomThink framework composed of three key modules: (i) a CoT annotation engine that automatically generates high-quality CoT annotations to address the lack of high-quality visual mathematical data; (ii) an atomic step fine-tuning strategy that jointly optimizes an MLLM and a policy reward model (PRM) for step-wise reasoning; and (iii) four different search strategies that can be applied with the PRM to complete reasoning. Additionally, we propose AtomMATH, a large-scale multimodal dataset of long CoTs, and an atomic capability evaluation metric for mathematical tasks. Extensive experimental results show that the proposed AtomThink significantly improves the performance of baseline MLLMs, achieving approximately 50\% relative accuracy gains on MathVista and 120\% on MathVerse. To support the advancement of multimodal slow-thinking models, we will make our code and dataset publicly available on https://github.com/Quinn777/AtomThink.
All Robots in One: A New Standard and Unified Dataset for Versatile, General-Purpose Embodied Agents
Aug 20, 2024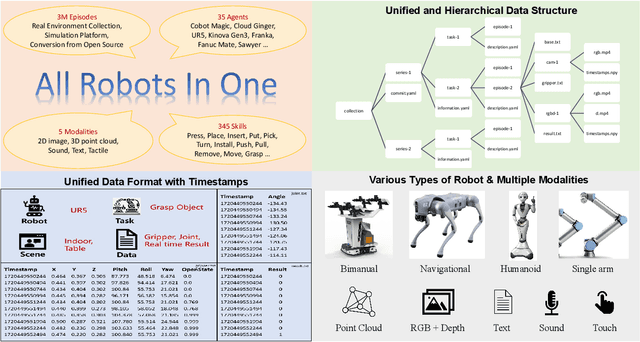

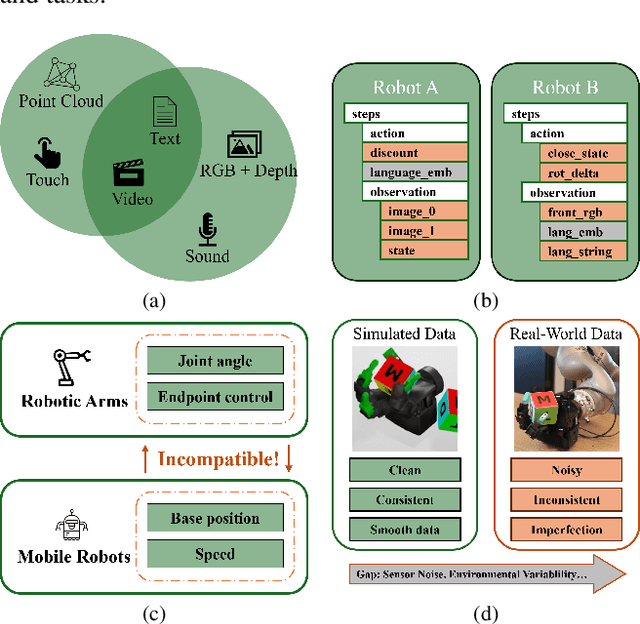
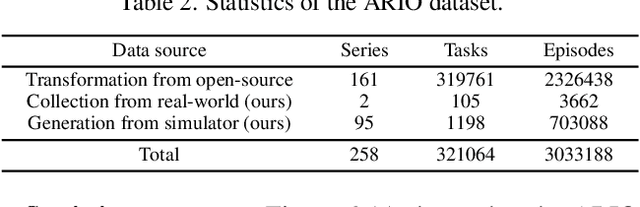
Embodied AI is transforming how AI systems interact with the physical world, yet existing datasets are inadequate for developing versatile, general-purpose agents. These limitations include a lack of standardized formats, insufficient data diversity, and inadequate data volume. To address these issues, we introduce ARIO (All Robots In One), a new data standard that enhances existing datasets by offering a unified data format, comprehensive sensory modalities, and a combination of real-world and simulated data. ARIO aims to improve the training of embodied AI agents, increasing their robustness and adaptability across various tasks and environments. Building upon the proposed new standard, we present a large-scale unified ARIO dataset, comprising approximately 3 million episodes collected from 258 series and 321,064 tasks. The ARIO standard and dataset represent a significant step towards bridging the gaps of existing data resources. By providing a cohesive framework for data collection and representation, ARIO paves the way for the development of more powerful and versatile embodied AI agents, capable of navigating and interacting with the physical world in increasingly complex and diverse ways. The project is available on https://imaei.github.io/project_pages/ario/
Correctable Landmark Discovery via Large Models for Vision-Language Navigation
May 29, 2024

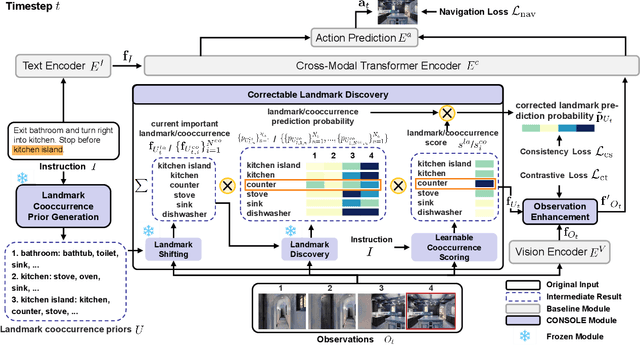

Vision-Language Navigation (VLN) requires the agent to follow language instructions to reach a target position. A key factor for successful navigation is to align the landmarks implied in the instruction with diverse visual observations. However, previous VLN agents fail to perform accurate modality alignment especially in unexplored scenes, since they learn from limited navigation data and lack sufficient open-world alignment knowledge. In this work, we propose a new VLN paradigm, called COrrectable LaNdmark DiScOvery via Large ModEls (CONSOLE). In CONSOLE, we cast VLN as an open-world sequential landmark discovery problem, by introducing a novel correctable landmark discovery scheme based on two large models ChatGPT and CLIP. Specifically, we use ChatGPT to provide rich open-world landmark cooccurrence commonsense, and conduct CLIP-driven landmark discovery based on these commonsense priors. To mitigate the noise in the priors due to the lack of visual constraints, we introduce a learnable cooccurrence scoring module, which corrects the importance of each cooccurrence according to actual observations for accurate landmark discovery. We further design an observation enhancement strategy for an elegant combination of our framework with different VLN agents, where we utilize the corrected landmark features to obtain enhanced observation features for action decision. Extensive experimental results on multiple popular VLN benchmarks (R2R, REVERIE, R4R, RxR) show the significant superiority of CONSOLE over strong baselines. Especially, our CONSOLE establishes the new state-of-the-art results on R2R and R4R in unseen scenarios. Code is available at https://github.com/expectorlin/CONSOLE.
NavCoT: Boosting LLM-Based Vision-and-Language Navigation via Learning Disentangled Reasoning
Mar 12, 2024



Vision-and-Language Navigation (VLN), as a crucial research problem of Embodied AI, requires an embodied agent to navigate through complex 3D environments following natural language instructions. Recent research has highlighted the promising capacity of large language models (LLMs) in VLN by improving navigational reasoning accuracy and interpretability. However, their predominant use in an offline manner usually suffers from substantial domain gap between the VLN task and the LLM training corpus. This paper introduces a novel strategy called Navigational Chain-of-Thought (NavCoT), where we fulfill parameter-efficient in-domain training to enable self-guided navigational decision, leading to a significant mitigation of the domain gap in a cost-effective manner. Specifically, at each timestep, the LLM is prompted to forecast the navigational chain-of-thought by: 1) acting as a world model to imagine the next observation according to the instruction, 2) selecting the candidate observation that best aligns with the imagination, and 3) determining the action based on the reasoning from the prior steps. Through constructing formalized labels for training, the LLM can learn to generate desired and reasonable chain-of-thought outputs for improving the action decision. Experimental results across various training settings and popular VLN benchmarks (e.g., Room-to-Room (R2R), Room-across-Room (RxR), Room-for-Room (R4R)) show the significant superiority of NavCoT over the direct action prediction variants. Through simple parameter-efficient finetuning, our NavCoT outperforms a recent GPT4-based approach with ~7% relative improvement on the R2R dataset. We believe that NavCoT will help unlock more task-adaptive and scalable LLM-based embodied agents, which are helpful for developing real-world robotics applications. Code is available at https://github.com/expectorlin/NavCoT.