 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAll Robots in One: A New Standard and Unified Dataset for Versatile, General-Purpose Embodied Agents
Paper and Code
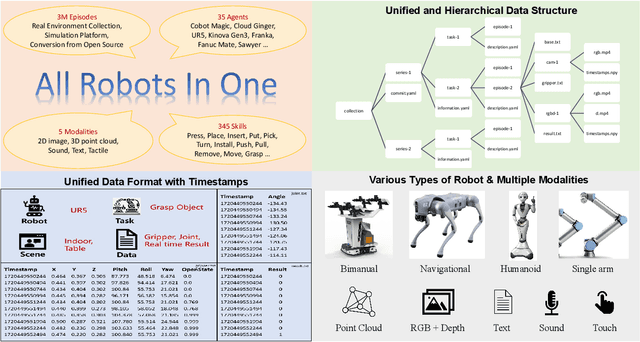

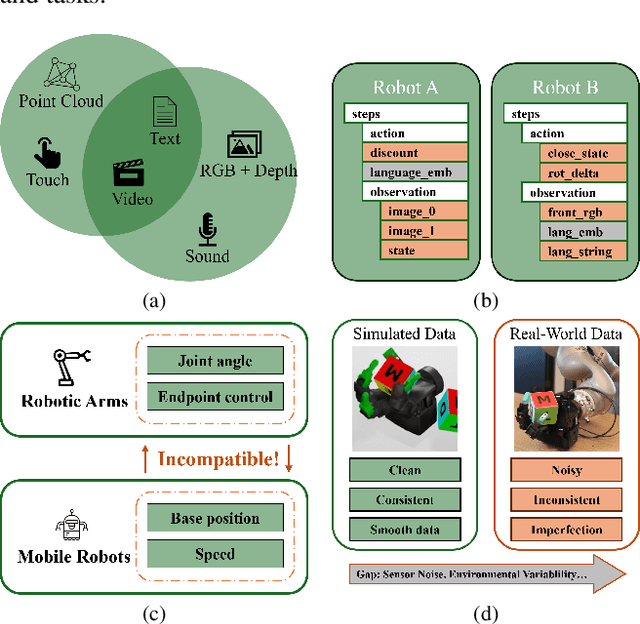
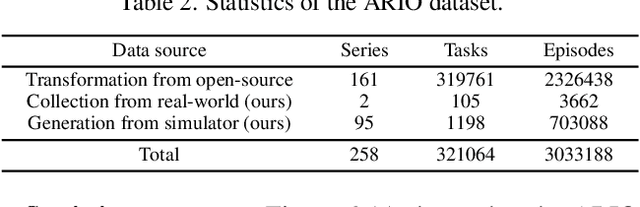
Embodied AI is transforming how AI systems interact with the physical world, yet existing datasets are inadequate for developing versatile, general-purpose agents. These limitations include a lack of standardized formats, insufficient data diversity, and inadequate data volume. To address these issues, we introduce ARIO (All Robots In One), a new data standard that enhances existing datasets by offering a unified data format, comprehensive sensory modalities, and a combination of real-world and simulated data. ARIO aims to improve the training of embodied AI agents, increasing their robustness and adaptability across various tasks and environments. Building upon the proposed new standard, we present a large-scale unified ARIO dataset, comprising approximately 3 million episodes collected from 258 series and 321,064 tasks. The ARIO standard and dataset represent a significant step towards bridging the gaps of existing data resources. By providing a cohesive framework for data collection and representation, ARIO paves the way for the development of more powerful and versatile embodied AI agents, capable of navigating and interacting with the physical world in increasingly complex and diverse ways. The project is available on https://imaei.github.io/project_pages/ario/