 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbryoDiff: A Conditional Diffusion Framework with Multi-Focal Feature Fusion for Fine-Grained Embryo Developmental Stage Recognition
Nov 14, 2025Identification of fine-grained embryo developmental stages during In Vitro Fertilization (IVF) is crucial for assessing embryo viability. Although recent deep learning methods have achieved promising accuracy, existing discriminative models fail to utilize the distributional prior of embryonic development to improve accuracy. Moreover, their reliance on single-focal information leads to incomplete embryonic representations, making them susceptible to feature ambiguity under cell occlusions. To address these limitations, we propose EmbryoDiff, a two-stage diffusion-based framework that formulates the task as a conditional sequence denoising process. Specifically, we first train and freeze a frame-level encoder to extract robust multi-focal features. In the second stage, we introduce a Multi-Focal Feature Fusion Strategy that aggregates information across focal planes to construct a 3D-aware morphological representation, effectively alleviating ambiguities arising from cell occlusions. Building on this fused representation, we derive complementary semantic and boundary cues and design a Hybrid Semantic-Boundary Condition Block to inject them into the diffusion-based denoising process, enabling accurate embryonic stage classification. Extensive experiments on two benchmark datasets show that our method achieves state-of-the-art results. Notably, with only a single denoising step, our model obtains the best average test performance, reaching 82.8% and 81.3% accuracy on the two datasets, respectively.
Time-Lapse Video-Based Embryo Grading via Complementary Spatial-Temporal Pattern Mining
Jun 05, 2025Artificial intelligence has recently shown promise in automated embryo selection for In-Vitro Fertilization (IVF). However, current approaches either address partial embryo evaluation lacking holistic quality assessment or target clinical outcomes inevitably confounded by extra-embryonic factors, both limiting clinical utility. To bridge this gap, we propose a new task called Video-Based Embryo Grading - the first paradigm that directly utilizes full-length time-lapse monitoring (TLM) videos to predict embryologists' overall quality assessments. To support this task, we curate a real-world clinical dataset comprising over 2,500 TLM videos, each annotated with a grading label indicating the overall quality of embryos. Grounded in clinical decision-making principles, we propose a Complementary Spatial-Temporal Pattern Mining (CoSTeM) framework that conceptually replicates embryologists' evaluation process. The CoSTeM comprises two branches: (1) a morphological branch using a Mixture of Cross-Attentive Experts layer and a Temporal Selection Block to select discriminative local structural features, and (2) a morphokinetic branch employing a Temporal Transformer to model global developmental trajectories, synergistically integrating static and dynamic determinants for grading embryos. Extensive experimental results demonstrate the superiority of our design. This work provides a valuable methodological framework for AI-assisted embryo selection. The dataset and source code will be publicly available upon acceptance.
ExoGait-MS: Learning Periodic Dynamics with Multi-Scale Graph Network for Exoskeleton Gait Recognition
May 23, 2025
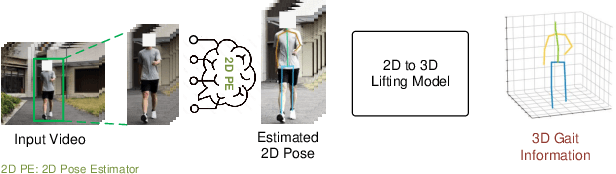


Current exoskeleton control methods often face challenges in delivering personalized treatment. Standardized walking gaits can lead to patient discomfort or even injury. Therefore, personalized gait is essential for the effectiveness of exoskeleton robots, as it directly impacts their adaptability, comfort, and rehabilitation outcomes for individual users. To enable personalized treatment in exoskeleton-assisted therapy and related applications, accurate recognition of personal gait is crucial for implementing tailored gait control. The key challenge in gait recognition lies in effectively capturing individual differences in subtle gait features caused by joint synergy, such as step frequency and step length. To tackle this issue, we propose a novel approach, which uses Multi-Scale Global Dense Graph Convolutional Networks (GCN) in the spatial domain to identify latent joint synergy patterns. Moreover, we propose a Gait Non-linear Periodic Dynamics Learning module to effectively capture the periodic characteristics of gait in the temporal domain. To support our individual gait recognition task, we have constructed a comprehensive gait dataset that ensures both completeness and reliability. Our experimental results demonstrate that our method achieves an impressive accuracy of 94.34% on this dataset, surpassing the current state-of-the-art (SOTA) by 3.77%. This advancement underscores the potential of our approach to enhance personalized gait control in exoskeleton-assisted therapy.
RoboAct-CLIP: Video-Driven Pre-training of Atomic Action Understanding for Robotics
Apr 02, 2025Visual Language Models (VLMs) have emerged as pivotal tools for robotic systems, enabling cross-task generalization, dynamic environmental interaction, and long-horizon planning through multimodal perception and semantic reasoning. However, existing open-source VLMs predominantly trained for generic vision-language alignment tasks fail to model temporally correlated action semantics that are crucial for robotic manipulation effectively. While current image-based fine-tuning methods partially adapt VLMs to robotic applications, they fundamentally disregard temporal evolution patterns in video sequences and suffer from visual feature entanglement between robotic agents, manipulated objects, and environmental contexts, thereby limiting semantic decoupling capability for atomic actions and compromising model generalizability.To overcome these challenges, this work presents RoboAct-CLIP with dual technical contributions: 1) A dataset reconstruction framework that performs semantic-constrained action unit segmentation and re-annotation on open-source robotic videos, constructing purified training sets containing singular atomic actions (e.g., "grasp"); 2) A temporal-decoupling fine-tuning strategy based on Contrastive Language-Image Pretraining (CLIP) architecture, which disentangles temporal action features across video frames from object-centric characteristics to achieve hierarchical representation learning of robotic atomic actions.Experimental results in simulated environments demonstrate that the RoboAct-CLIP pretrained model achieves a 12% higher success rate than baseline VLMs, along with superior generalization in multi-object manipulation tasks.
GenM$^3$: Generative Pretrained Multi-path Motion Model for Text Conditional Human Motion Generation
Mar 19, 2025Scaling up motion datasets is crucial to enhance motion generation capabilities. However, training on large-scale multi-source datasets introduces data heterogeneity challenges due to variations in motion content. To address this, we propose Generative Pretrained Multi-path Motion Model (GenM$^3$), a comprehensive framework designed to learn unified motion representations. GenM$^3$ comprises two components: 1) a Multi-Expert VQ-VAE (MEVQ-VAE) that adapts to different dataset distributions to learn a unified discrete motion representation, and 2) a Multi-path Motion Transformer (MMT) that improves intra-modal representations by using separate modality-specific pathways, each with densely activated experts to accommodate variations within that modality, and improves inter-modal alignment by the text-motion shared pathway. To enable large-scale training, we integrate and unify 11 high-quality motion datasets (approximately 220 hours of motion data) and augment it with textual annotations (nearly 10,000 motion sequences labeled by a large language model and 300+ by human experts). After training on our integrated dataset, GenM$^3$ achieves a state-of-the-art FID of 0.035 on the HumanML3D benchmark, surpassing state-of-the-art methods by a large margin. It also demonstrates strong zero-shot generalization on IDEA400 dataset, highlighting its effectiveness and adaptability across diverse motion scenarios.
TeraSim: Uncovering Unknown Unsafe Events for Autonomous Vehicles through Generative Simulation
Mar 06, 2025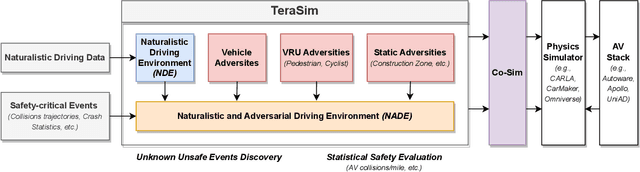
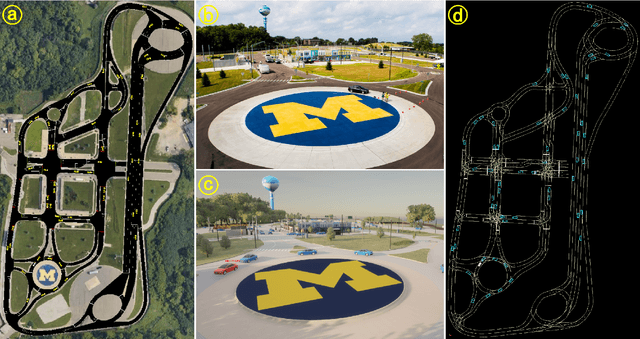
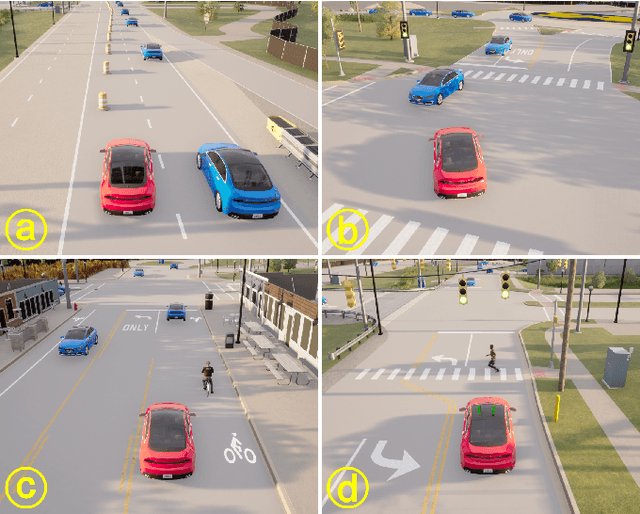
Traffic simulation is essential for autonomous vehicle (AV) development, enabling comprehensive safety evaluation across diverse driving conditions. However, traditional rule-based simulators struggle to capture complex human interactions, while data-driven approaches often fail to maintain long-term behavioral realism or generate diverse safety-critical events. To address these challenges, we propose TeraSim, an open-source, high-fidelity traffic simulation platform designed to uncover unknown unsafe events and efficiently estimate AV statistical performance metrics, such as crash rates. TeraSim is designed for seamless integration with third-party physics simulators and standalone AV stacks, to construct a complete AV simulation system. Experimental results demonstrate its effectiveness in generating diverse safety-critical events involving both static and dynamic agents, identifying hidden deficiencies in AV systems, and enabling statistical performance evaluation. These findings highlight TeraSim's potential as a practical tool for AV safety assessment, benefiting researchers, developers, and policymakers. The code is available at https://github.com/mcity/TeraSim.
Fusion Makes Perfection: An Efficient Multi-Grained Matching Approach for Zero-Shot Relation Extraction
Jun 17, 2024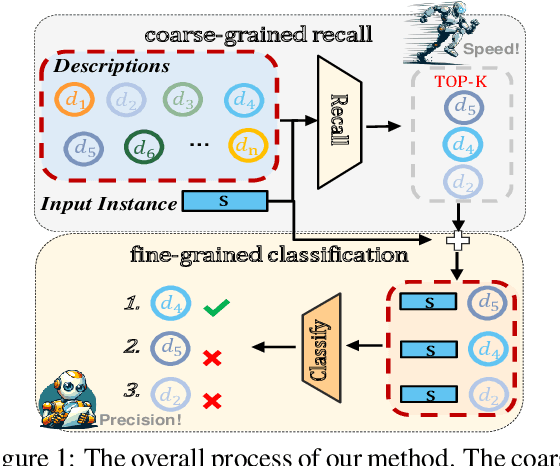
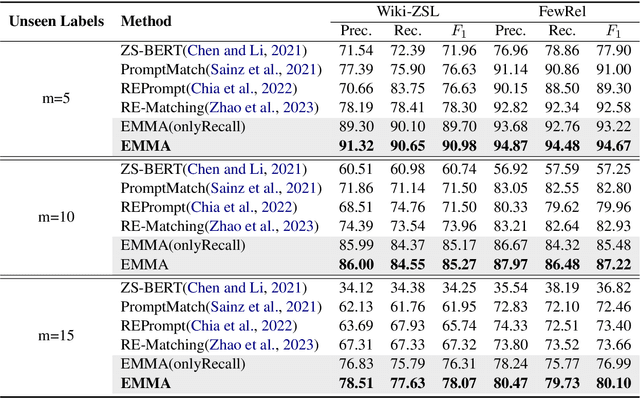
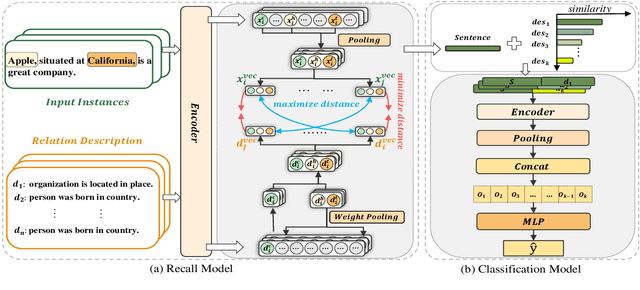
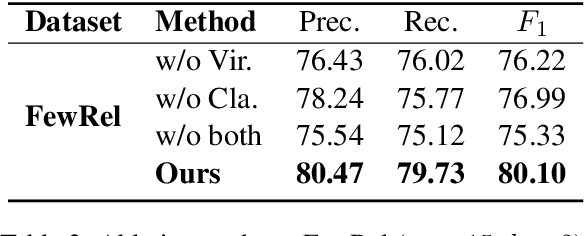
Predicting unseen relations that cannot be observed during the training phase is a challenging task in relation extraction. Previous works have made progress by matching the semantics between input instances and label descriptions. However, fine-grained matching often requires laborious manual annotation, and rich interactions between instances and label descriptions come with significant computational overhead. In this work, we propose an efficient multi-grained matching approach that uses virtual entity matching to reduce manual annotation cost, and fuses coarse-grained recall and fine-grained classification for rich interactions with guaranteed inference speed. Experimental results show that our approach outperforms the previous State Of The Art (SOTA) methods, and achieves a balance between inference efficiency and prediction accuracy in zero-shot relation extraction tasks. Our code is available at https://github.com/longls777/EMMA.