 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOFA-FL: Self-Organizing Hierarchical Federated Learning with Adaptive Clustered Data Sharing
Dec 09, 2025Federated Learning (FL) faces significant challenges in evolving environments, particularly regarding data heterogeneity and the rigidity of fixed network topologies. To address these issues, this paper proposes \textbf{SOFA-FL} (Self-Organizing Hierarchical Federated Learning with Adaptive Clustered Data Sharing), a novel framework that enables hierarchical federated systems to self-organize and adapt over time. The framework is built upon three core mechanisms: (1) \textbf{Dynamic Multi-branch Agglomerative Clustering (DMAC)}, which constructs an initial efficient hierarchical structure; (2) \textbf{Self-organizing Hierarchical Adaptive Propagation and Evolution (SHAPE)}, which allows the system to dynamically restructure its topology through atomic operations -- grafting, pruning, consolidation, and purification -- to adapt to changes in data distribution; and (3) \textbf{Adaptive Clustered Data Sharing}, which mitigates data heterogeneity by enabling controlled partial data exchange between clients and cluster nodes. By integrating these mechanisms, SOFA-FL effectively captures dynamic relationships among clients and enhances personalization capabilities without relying on predetermined cluster structures.
Bio AI Agent: A Multi-Agent Artificial Intelligence System for Autonomous CAR-T Cell Therapy Development with Integrated Target Discovery, Toxicity Prediction, and Rational Molecular Design
Nov 11, 2025Chimeric antigen receptor T-cell (CAR-T) therapy represents a paradigm shift in cancer treatment, yet development timelines of 8-12 years and clinical attrition rates exceeding 40-60% highlight critical inefficiencies in target selection, safety assessment, and molecular optimization. We present Bio AI Agent, a multi-agent artificial intelligence system powered by large language models that enables autonomous CAR-T development through collaborative specialized agents. The system comprises six autonomous agents: Target Selection Agent for multi-parametric antigen prioritization across >10,000 cancer-associated targets, Toxicity Prediction Agent for comprehensive safety profiling integrating tissue expression atlases and pharmacovigilance databases, Molecular Design Agent for rational CAR engineering, Patent Intelligence Agent for freedom-to-operate analysis, Clinical Translation Agent for regulatory compliance, and Decision Orchestration Agent for multi-agent coordination. Retrospective validation demonstrated autonomous identification of high-risk targets including FcRH5 (hepatotoxicity) and CD229 (off-tumor toxicity), patent infringement risks for CD38+SLAMF7 combinations, and generation of comprehensive development roadmaps. By enabling parallel processing, specialized reasoning, and autonomous decision-making superior to monolithic AI systems, Bio AI Agent addresses critical gaps in precision oncology development and has potential to accelerate translation of next-generation immunotherapies from discovery to clinic.
3rd Workshop on Maritime Computer Vision (MaCVi) 2025: Challenge Results
Jan 17, 2025The 3rd Workshop on Maritime Computer Vision (MaCVi) 2025 addresses maritime computer vision for Unmanned Surface Vehicles (USV) and underwater. This report offers a comprehensive overview of the findings from the challenges. We provide both statistical and qualitative analyses, evaluating trends from over 700 submissions. All datasets, evaluation code, and the leaderboard are available to the public at https://macvi.org/workshop/macvi25.
WaterScenes: A Multi-Task 4D Radar-Camera Fusion Dataset and Benchmark for Autonomous Driving on Water Surfaces
Jul 13, 2023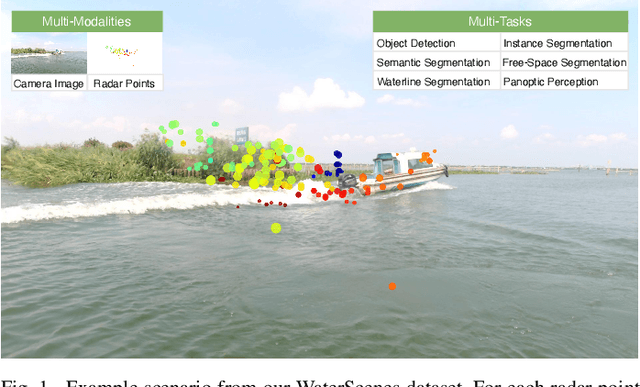
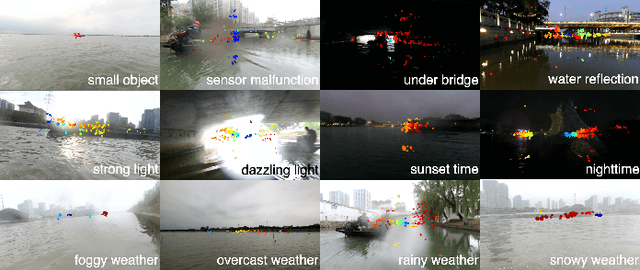
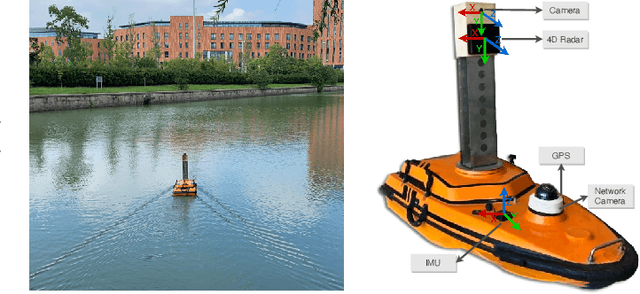
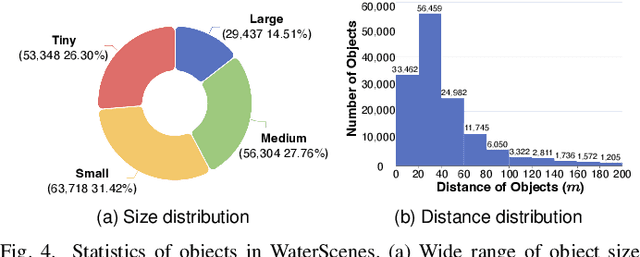
Autonomous driving on water surfaces plays an essential role in executing hazardous and time-consuming missions, such as maritime surveillance, survivors rescue, environmental monitoring, hydrography mapping and waste cleaning. This work presents WaterScenes, the first multi-task 4D radar-camera fusion dataset for autonomous driving on water surfaces. Equipped with a 4D radar and a monocular camera, our Unmanned Surface Vehicle (USV) proffers all-weather solutions for discerning object-related information, including color, shape, texture, range, velocity, azimuth, and elevation. Focusing on typical static and dynamic objects on water surfaces, we label the camera images and radar point clouds at pixel-level and point-level, respectively. In addition to basic perception tasks, such as object detection, instance segmentation and semantic segmentation, we also provide annotations for free-space segmentation and waterline segmentation. Leveraging the multi-task and multi-modal data, we conduct numerous experiments on the single modality of radar and camera, as well as the fused modalities. Results demonstrate that 4D radar-camera fusion can considerably enhance the robustness of perception on water surfaces, especially in adverse lighting and weather conditions. WaterScenes dataset is public on https://waterscenes.github.io.