 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncomplete Modality Disentangled Representation for Ophthalmic Disease Grading and Diagnosis
Feb 17, 2025



Ophthalmologists typically require multimodal data sources to improve diagnostic accuracy in clinical decisions. However, due to medical device shortages, low-quality data and data privacy concerns, missing data modalities are common in real-world scenarios. Existing deep learning methods tend to address it by learning an implicit latent subspace representation for different modality combinations. We identify two significant limitations of these methods: (1) implicit representation constraints that hinder the model's ability to capture modality-specific information and (2) modality heterogeneity, causing distribution gaps and redundancy in feature representations. To address these, we propose an Incomplete Modality Disentangled Representation (IMDR) strategy, which disentangles features into explicit independent modal-common and modal-specific features by guidance of mutual information, distilling informative knowledge and enabling it to reconstruct valuable missing semantics and produce robust multimodal representations. Furthermore, we introduce a joint proxy learning module that assists IMDR in eliminating intra-modality redundancy by exploiting the extracted proxies from each class. Experiments on four ophthalmology multimodal datasets demonstrate that the proposed IMDR outperforms the state-of-the-art methods significantly.
* 7 Pages, 6 figures
MC-DBN: A Deep Belief Network-Based Model for Modality Completion
Feb 15, 2024



Recent advancements in multi-modal artificial intelligence (AI) have revolutionized the fields of stock market forecasting and heart rate monitoring. Utilizing diverse data sources can substantially improve prediction accuracy. Nonetheless, additional data may not always align with the original dataset. Interpolation methods are commonly utilized for handling missing values in modal data, though they may exhibit limitations in the context of sparse information. Addressing this challenge, we propose a Modality Completion Deep Belief Network-Based Model (MC-DBN). This approach utilizes implicit features of complete data to compensate for gaps between itself and additional incomplete data. It ensures that the enhanced multi-modal data closely aligns with the dynamic nature of the real world to enhance the effectiveness of the model. We conduct evaluations of the MC-DBN model in two datasets from the stock market forecasting and heart rate monitoring domains. Comprehensive experiments showcase the model's capacity to bridge the semantic divide present in multi-modal data, subsequently enhancing its performance. The source code is available at: https://github.com/logan-0623/DBN-generate
WaterScenes: A Multi-Task 4D Radar-Camera Fusion Dataset and Benchmark for Autonomous Driving on Water Surfaces
Jul 13, 2023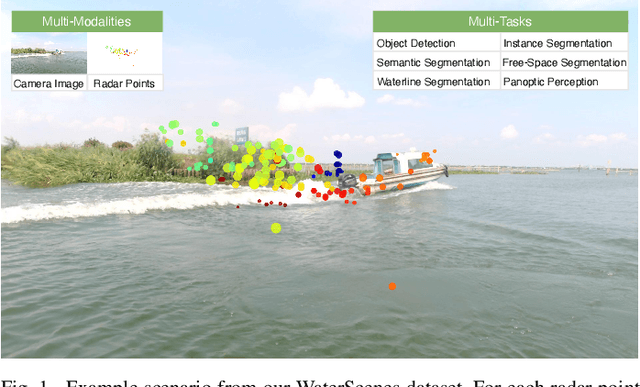
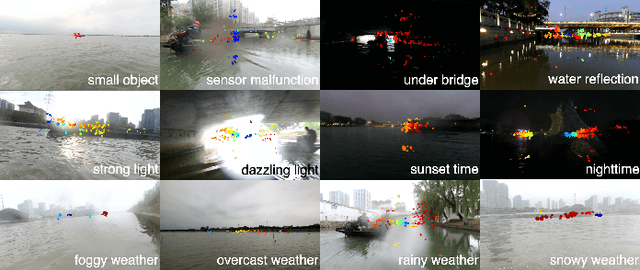
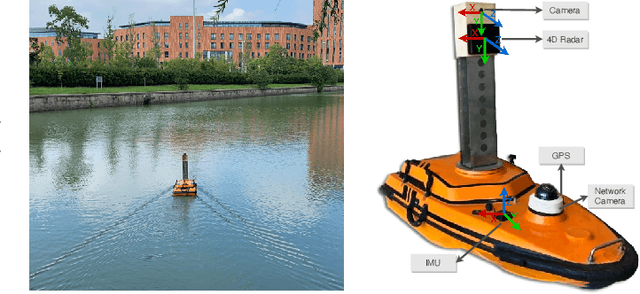
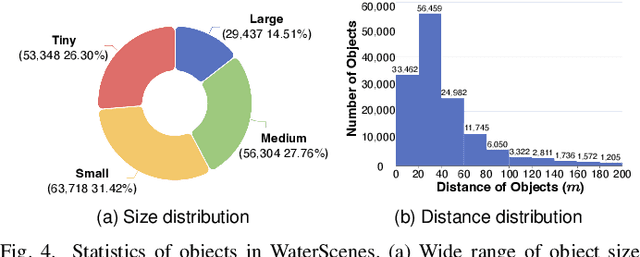
Autonomous driving on water surfaces plays an essential role in executing hazardous and time-consuming missions, such as maritime surveillance, survivors rescue, environmental monitoring, hydrography mapping and waste cleaning. This work presents WaterScenes, the first multi-task 4D radar-camera fusion dataset for autonomous driving on water surfaces. Equipped with a 4D radar and a monocular camera, our Unmanned Surface Vehicle (USV) proffers all-weather solutions for discerning object-related information, including color, shape, texture, range, velocity, azimuth, and elevation. Focusing on typical static and dynamic objects on water surfaces, we label the camera images and radar point clouds at pixel-level and point-level, respectively. In addition to basic perception tasks, such as object detection, instance segmentation and semantic segmentation, we also provide annotations for free-space segmentation and waterline segmentation. Leveraging the multi-task and multi-modal data, we conduct numerous experiments on the single modality of radar and camera, as well as the fused modalities. Results demonstrate that 4D radar-camera fusion can considerably enhance the robustness of perception on water surfaces, especially in adverse lighting and weather conditions. WaterScenes dataset is public on https://waterscenes.github.io.