 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRhythm of Opinion: A Hawkes-Graph Framework for Dynamic Propagation Analysis
Apr 21, 2025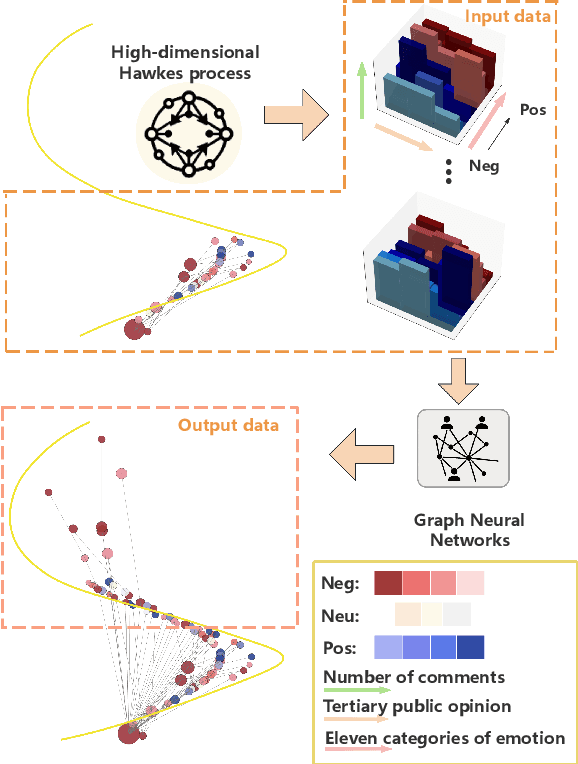
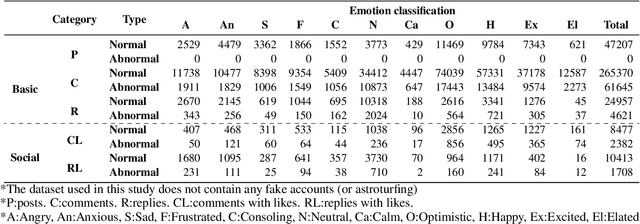
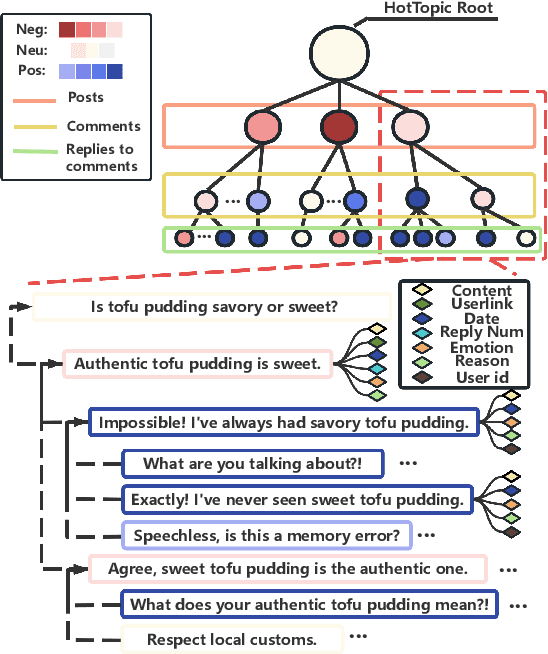
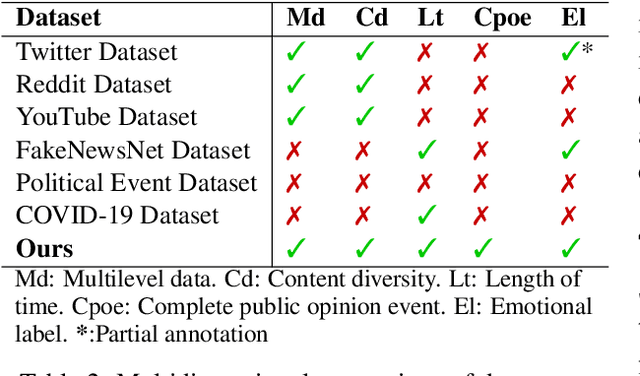
The rapid development of social media has significantly reshaped the dynamics of public opinion, resulting in complex interactions that traditional models fail to effectively capture. To address this challenge, we propose an innovative approach that integrates multi-dimensional Hawkes processes with Graph Neural Network, modeling opinion propagation dynamics among nodes in a social network while considering the intricate hierarchical relationships between comments. The extended multi-dimensional Hawkes process captures the hierarchical structure, multi-dimensional interactions, and mutual influences across different topics, forming a complex propagation network. Moreover, recognizing the lack of high-quality datasets capable of comprehensively capturing the evolution of public opinion dynamics, we introduce a new dataset, VISTA. It includes 159 trending topics, corresponding to 47,207 posts, 327,015 second-level comments, and 29,578 third-level comments, covering diverse domains such as politics, entertainment, sports, health, and medicine. The dataset is annotated with detailed sentiment labels across 11 categories and clearly defined hierarchical relationships. When combined with our method, it offers strong interpretability by linking sentiment propagation to the comment hierarchy and temporal evolution. Our approach provides a robust baseline for future research.
MSWAL: 3D Multi-class Segmentation of Whole Abdominal Lesions Dataset
Mar 17, 2025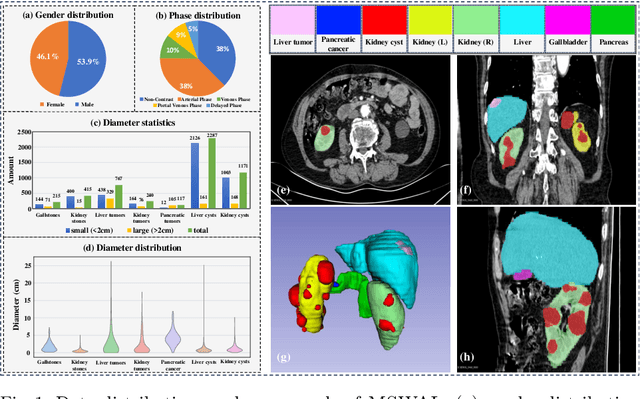
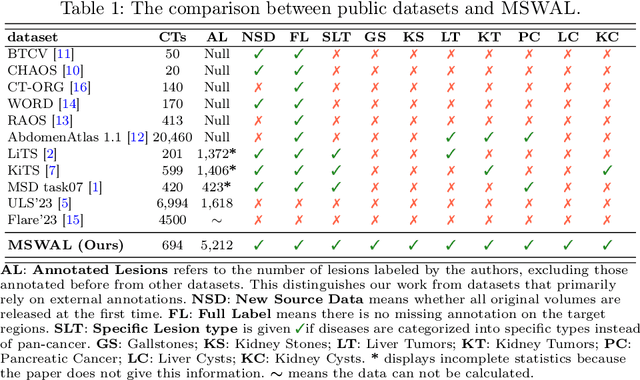
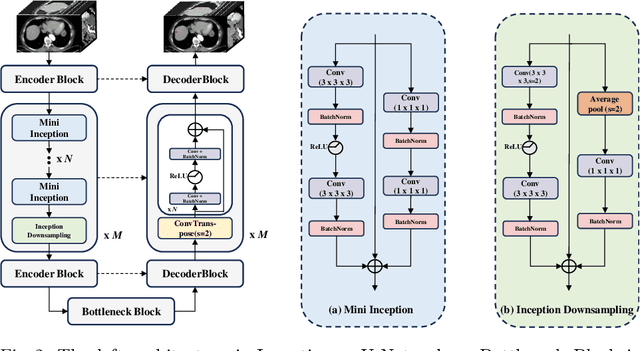
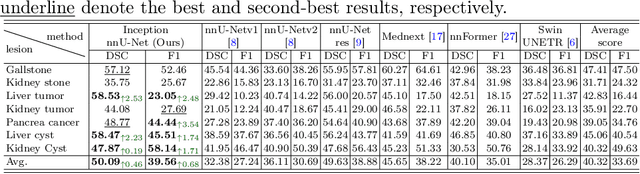
With the significantly increasing incidence and prevalence of abdominal diseases, there is a need to embrace greater use of new innovations and technology for the diagnosis and treatment of patients. Although deep-learning methods have notably been developed to assist radiologists in diagnosing abdominal diseases, existing models have the restricted ability to segment common lesions in the abdomen due to missing annotations for typical abdominal pathologies in their training datasets. To address the limitation, we introduce MSWAL, the first 3D Multi-class Segmentation of the Whole Abdominal Lesions dataset, which broadens the coverage of various common lesion types, such as gallstones, kidney stones, liver tumors, kidney tumors, pancreatic cancer, liver cysts, and kidney cysts. With CT scans collected from 694 patients (191,417 slices) of different genders across various scanning phases, MSWAL demonstrates strong robustness and generalizability. The transfer learning experiment from MSWAL to two public datasets, LiTS and KiTS, effectively demonstrates consistent improvements, with Dice Similarity Coefficient (DSC) increase of 3.00% for liver tumors and 0.89% for kidney tumors, demonstrating that the comprehensive annotations and diverse lesion types in MSWAL facilitate effective learning across different domains and data distributions. Furthermore, we propose Inception nnU-Net, a novel segmentation framework that effectively integrates an Inception module with the nnU-Net architecture to extract information from different receptive fields, achieving significant enhancement in both voxel-level DSC and region-level F1 compared to the cutting-edge public algorithms on MSWAL. Our dataset will be released after being accepted, and the code is publicly released at https://github.com/tiuxuxsh76075/MSWAL-.
WaterScenes: A Multi-Task 4D Radar-Camera Fusion Dataset and Benchmark for Autonomous Driving on Water Surfaces
Jul 13, 2023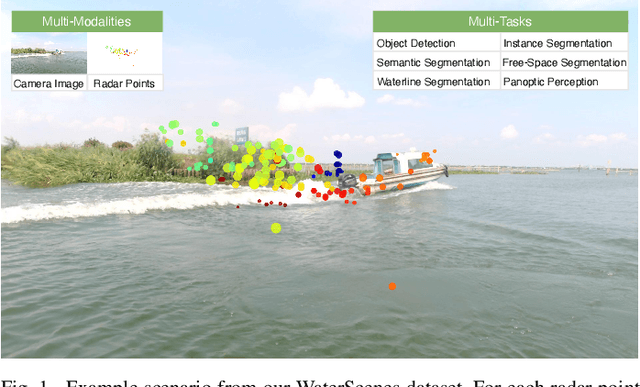
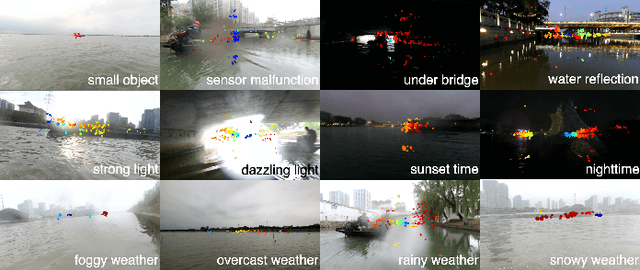
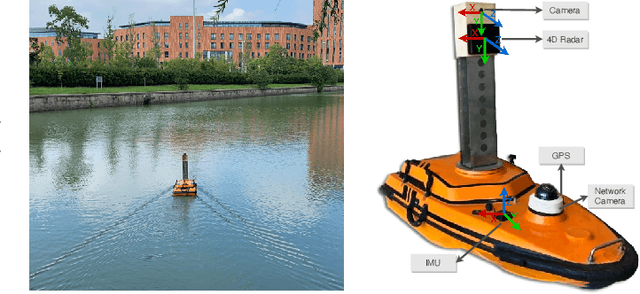
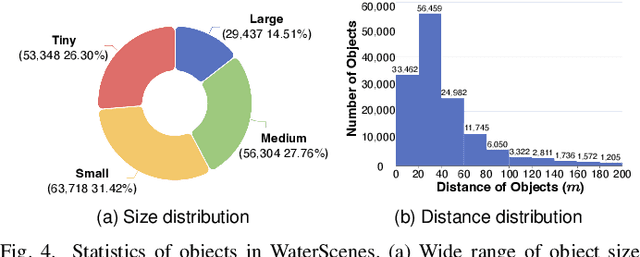
Autonomous driving on water surfaces plays an essential role in executing hazardous and time-consuming missions, such as maritime surveillance, survivors rescue, environmental monitoring, hydrography mapping and waste cleaning. This work presents WaterScenes, the first multi-task 4D radar-camera fusion dataset for autonomous driving on water surfaces. Equipped with a 4D radar and a monocular camera, our Unmanned Surface Vehicle (USV) proffers all-weather solutions for discerning object-related information, including color, shape, texture, range, velocity, azimuth, and elevation. Focusing on typical static and dynamic objects on water surfaces, we label the camera images and radar point clouds at pixel-level and point-level, respectively. In addition to basic perception tasks, such as object detection, instance segmentation and semantic segmentation, we also provide annotations for free-space segmentation and waterline segmentation. Leveraging the multi-task and multi-modal data, we conduct numerous experiments on the single modality of radar and camera, as well as the fused modalities. Results demonstrate that 4D radar-camera fusion can considerably enhance the robustness of perception on water surfaces, especially in adverse lighting and weather conditions. WaterScenes dataset is public on https://waterscenes.github.io.