 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadar Perception in Autonomous Driving: Exploring Different Data Representations
Dec 08, 2023



With the rapid advancements of sensor technology and deep learning, autonomous driving systems are providing safe and efficient access to intelligent vehicles as well as intelligent transportation. Among these equipped sensors, the radar sensor plays a crucial role in providing robust perception information in diverse environmental conditions. This review focuses on exploring different radar data representations utilized in autonomous driving systems. Firstly, we introduce the capabilities and limitations of the radar sensor by examining the working principles of radar perception and signal processing of radar measurements. Then, we delve into the generation process of five radar representations, including the ADC signal, radar tensor, point cloud, grid map, and micro-Doppler signature. For each radar representation, we examine the related datasets, methods, advantages and limitations. Furthermore, we discuss the challenges faced in these data representations and propose potential research directions. Above all, this comprehensive review offers an in-depth insight into how these representations enhance autonomous system capabilities, providing guidance for radar perception researchers. To facilitate retrieval and comparison of different data representations, datasets and methods, we provide an interactive website at https://radar-camera-fusion.github.io/radar.
WaterScenes: A Multi-Task 4D Radar-Camera Fusion Dataset and Benchmark for Autonomous Driving on Water Surfaces
Jul 13, 2023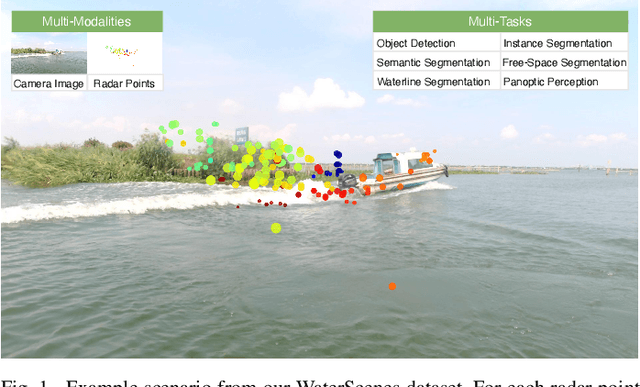
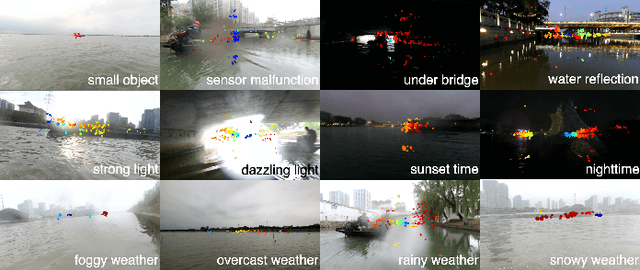
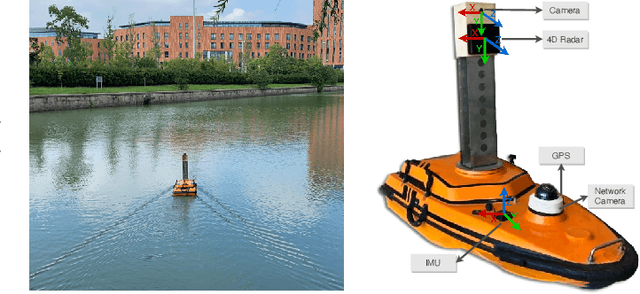
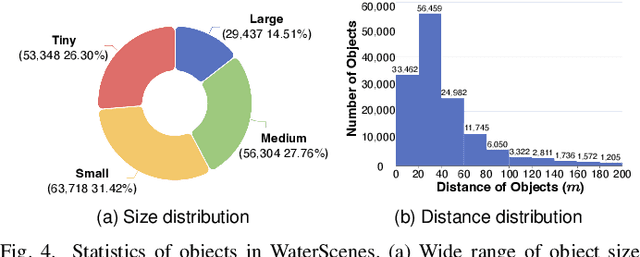
Autonomous driving on water surfaces plays an essential role in executing hazardous and time-consuming missions, such as maritime surveillance, survivors rescue, environmental monitoring, hydrography mapping and waste cleaning. This work presents WaterScenes, the first multi-task 4D radar-camera fusion dataset for autonomous driving on water surfaces. Equipped with a 4D radar and a monocular camera, our Unmanned Surface Vehicle (USV) proffers all-weather solutions for discerning object-related information, including color, shape, texture, range, velocity, azimuth, and elevation. Focusing on typical static and dynamic objects on water surfaces, we label the camera images and radar point clouds at pixel-level and point-level, respectively. In addition to basic perception tasks, such as object detection, instance segmentation and semantic segmentation, we also provide annotations for free-space segmentation and waterline segmentation. Leveraging the multi-task and multi-modal data, we conduct numerous experiments on the single modality of radar and camera, as well as the fused modalities. Results demonstrate that 4D radar-camera fusion can considerably enhance the robustness of perception on water surfaces, especially in adverse lighting and weather conditions. WaterScenes dataset is public on https://waterscenes.github.io.
Radar-Camera Fusion for Object Detection and Semantic Segmentation in Autonomous Driving: A Comprehensive Review
Apr 20, 2023



Driven by deep learning techniques, perception technology in autonomous driving has developed rapidly in recent years. To achieve accurate and robust perception capabilities, autonomous vehicles are often equipped with multiple sensors, making sensor fusion a crucial part of the perception system. Among these fused sensors, radars and cameras enable a complementary and cost-effective perception of the surrounding environment regardless of lighting and weather conditions. This review aims to provide a comprehensive guideline for radar-camera fusion, particularly concentrating on perception tasks related to object detection and semantic segmentation. Based on the principles of the radar and camera sensors, we delve into the data processing process and representations, followed by an in-depth analysis and summary of radar-camera fusion datasets. In the review of methodologies in radar-camera fusion, we address interrogative questions, including "why to fuse", "what to fuse", "where to fuse", "when to fuse", and "how to fuse", subsequently discussing various challenges and potential research directions within this domain. To ease the retrieval and comparison of datasets and fusion methods, we also provide an interactive website: https://XJTLU-VEC.github.io/Radar-Camera-Fusion.
Deformation measurement of a soil mixing retaining wall using terrestrial laser scanning
Jan 12, 2023



Retaining walls are often built to prevent excessive lateral movements of the ground surrounding an excavation site. During an excavation, failure of retaining walls could cause catastrophic accidents and hence their lateral deformations are monitored regularly. Laser scanning can rapidly acquire the spatial data of a relatively large area at fine spatial resolutions, which is ideal for monitoring retaining walls' deformations. This paper attempts to apply laser scanning to measurements of the lateral deformations of a soil mixing retaining wall at an ongoing excavation site. Reference measurements by total station and inclinometer were also conducted to verify those from the laser scanning. The deformations derived using laser scanning data were consistent with the reference measurements at the top part of the retaining wall (i.e., mainly the ring beam of the wall). This research also shows that the multi-scale-model-to-model method was the most accurate deformation estimation method on the research data.