 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Neuromodulation Outcome for Parkinson's Disease with Generative Virtual Brain Model
Mar 31, 2026Parkinson's disease (PD) affects over ten million people worldwide. Although temporal interference (TI) and deep brain stimulation (DBS) are promising therapies, inter-individual variability limits empirical treatment selection, increasing non-negligible surgical risk and cost. Previous explorations either resort to limited statistical biomarkers that are insufficient to characterize variability, or employ AI-driven methods which is prone to overfitting and opacity. We bridge this gap with a pretraining-finetuning framework to predict outcomes directly from resting-state fMRI. Critically, a generative virtual brain foundation model, pretrained on a collective dataset (2707 subjects, 5621 sessions) to capture universal disorder patterns, was finetuned on PD cohorts receiving TI (n=51) or DBS (n=55) to yield individualized virtual brains with high fidelity to empirical functional connectivity (r=0.935). By constructing counterfactual estimations between pathological and healthy neural states within these personalized models, we predicted clinical responses (TI: AUPR=0.853; DBS: AUPR=0.915), substantially outperforming baselines. External and prospective validations (n=14, n=11) highlight the feasibility of clinical translation. Moreover, our framework provides state-dependent regional patterns linked to response, offering hypothesis-generating mechanistic insights.
DreamLite: A Lightweight On-Device Unified Model for Image Generation and Editing
Mar 30, 2026Diffusion models have made significant progress in both text-to-image (T2I) generation and text-guided image editing. However, these models are typically built with billions of parameters, leading to high latency and increased deployment challenges. While on-device diffusion models improve efficiency, they largely focus on T2I generation and lack support for image editing. In this paper, we propose DreamLite, a compact unified on-device diffusion model (0.39B) that supports both T2I generation and text-guided image editing within a single network. DreamLite is built on a pruned mobile U-Net backbone and unifies conditioning through in-context spatial concatenation in the latent space. It concatenates images horizontally as input, using a (target | blank) configuration for generation tasks and (target | source) for editing tasks. To stabilize the training of this compact model, we introduce a task-progressive joint pretraining strategy that sequentially targets T2I, editing, and joint tasks. After high-quality SFT and reinforcement learning, DreamLite achieves GenEval (0.72) for image generation and ImgEdit (4.11) for image editing, outperforming existing on-device models and remaining competitive with several server-side models. By employing step distillation, we further reduce denoising processing to just 4 steps, enabling our DreamLite could generate or edit a 1024 x 1024 image in less than 1s on a Xiaomi 14 smartphone. To the best of our knowledge, DreamLite is the first unified on-device diffusion model that supports both image generation and image editing.
As If We've Met Before: LLMs Exhibit Certainty in Recognizing Seen Files
Nov 19, 2025The remarkable language ability of Large Language Models (LLMs) stems from extensive training on vast datasets, often including copyrighted material, which raises serious concerns about unauthorized use. While Membership Inference Attacks (MIAs) offer potential solutions for detecting such violations, existing approaches face critical limitations and challenges due to LLMs' inherent overconfidence, limited access to ground truth training data, and reliance on empirically determined thresholds. We present COPYCHECK, a novel framework that leverages uncertainty signals to detect whether copyrighted content was used in LLM training sets. Our method turns LLM overconfidence from a limitation into an asset by capturing uncertainty patterns that reliably distinguish between ``seen" (training data) and ``unseen" (non-training data) content. COPYCHECK further implements a two-fold strategy: (1) strategic segmentation of files into smaller snippets to reduce dependence on large-scale training data, and (2) uncertainty-guided unsupervised clustering to eliminate the need for empirically tuned thresholds. Experiment results show that COPYCHECK achieves an average balanced accuracy of 90.1% on LLaMA 7b and 91.6% on LLaMA2 7b in detecting seen files. Compared to the SOTA baseline, COPYCHECK achieves over 90% relative improvement, reaching up to 93.8\% balanced accuracy. It further exhibits strong generalizability across architectures, maintaining high performance on GPT-J 6B. This work presents the first application of uncertainty for copyright detection in LLMs, offering practical tools for training data transparency.
Generating Rectifiable Measures through Neural Networks
Dec 06, 2024We derive universal approximation results for the class of (countably) $m$-rectifiable measures. Specifically, we prove that $m$-rectifiable measures can be approximated as push-forwards of the one-dimensional Lebesgue measure on $[0,1]$ using ReLU neural networks with arbitrarily small approximation error in terms of Wasserstein distance. What is more, the weights in the networks under consideration are quantized and bounded and the number of ReLU neural networks required to achieve an approximation error of $\varepsilon$ is no larger than $2^{b(\varepsilon)}$ with $b(\varepsilon)=\mathcal{O}(\varepsilon^{-m}\log^2(\varepsilon))$. This result improves Lemma IX.4 in Perekrestenko et al. as it shows that the rate at which $b(\varepsilon)$ tends to infinity as $\varepsilon$ tends to zero equals the rectifiability parameter $m$, which can be much smaller than the ambient dimension. We extend this result to countably $m$-rectifiable measures and show that this rate still equals the rectifiability parameter $m$ provided that, among other technical assumptions, the measure decays exponentially on the individual components of the countably $m$-rectifiable support set.
Reverse Refinement Network for Narrow Rural Road Detection in High-Resolution Satellite Imagery
Oct 14, 2024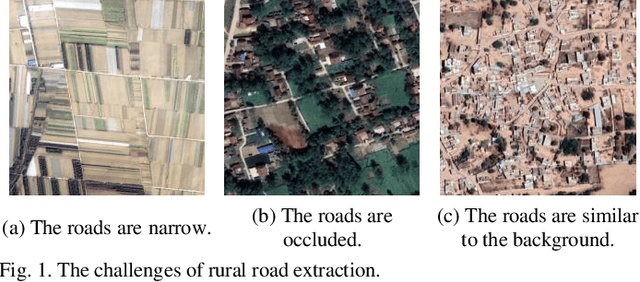
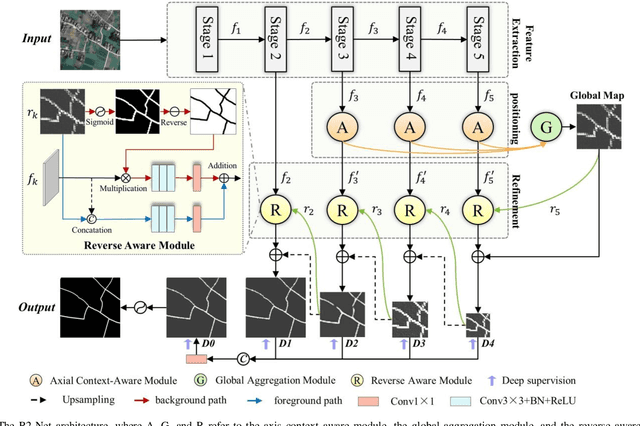
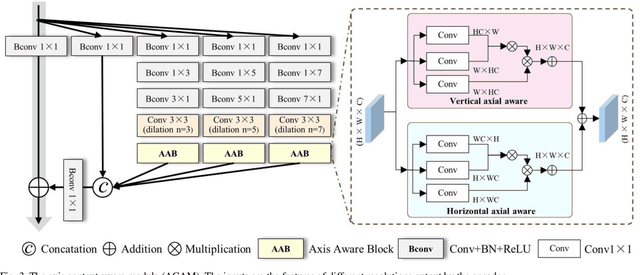
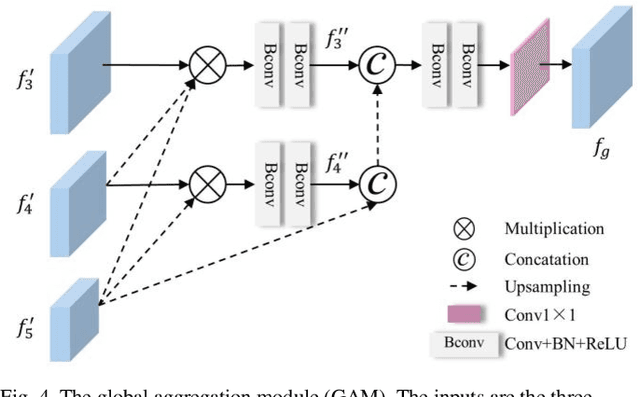
The automated extraction of rural roads is pivotal for rural development and transportation planning, serving as a cornerstone for socio-economic progress. Current research primarily focuses on road extraction in urban areas. However, rural roads present unique challenges due to their narrow and irregular nature, posing significant difficulties for road extraction. In this article, a reverse refinement network (R2-Net) is proposed to extract narrow rural roads, enhancing their connectivity and distinctiveness from the background. Specifically, to preserve the fine details of roads within high-resolution feature maps, R2-Net utilizes an axis context aware module (ACAM) to capture the long-distance spatial context information in various layers. Subsequently, the multi-level features are aggregated through a global aggregation module (GAM). Moreover, in the decoder stage, R2-Net employs a reverse-aware module (RAM) to direct the attention of the network to the complex background, thus amplifying its separability. In experiments, we compare R2-Net with several state-of-the-art methods using the DeepGlobe road extraction dataset and the WHU-RuR+ global large-scale rural road dataset. R2-Net achieved superior performance and especially excelled in accurately detecting narrow roads. Furthermore, we explored the applicability of R2-Net for large-scale rural road mapping. The results show that the proposed R2-Net has significant performance advantages for large-scale rural road mapping applications.
Metric-Entropy Limits on Nonlinear Dynamical System Learning
Jul 01, 2024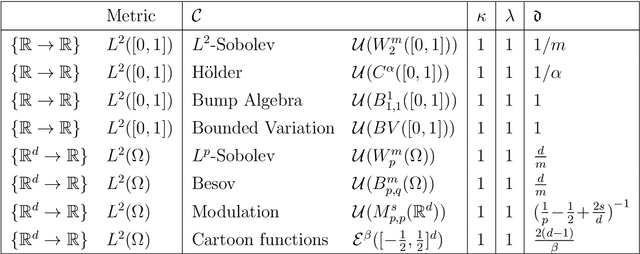


This paper is concerned with the fundamental limits of nonlinear dynamical system learning from input-output traces. Specifically, we show that recurrent neural networks (RNNs) are capable of learning nonlinear systems that satisfy a Lipschitz property and forget past inputs fast enough in a metric-entropy optimal manner. As the sets of sequence-to-sequence maps realized by the dynamical systems we consider are significantly more massive than function classes generally considered in deep neural network approximation theory, a refined metric-entropy characterization is needed, namely in terms of order, type, and generalized dimension. We compute these quantities for the classes of exponentially-decaying and polynomially-decaying Lipschitz fading-memory systems and show that RNNs can achieve them.
Hand Gestures Recognition in Videos Taken with Lensless Camera
Oct 15, 2022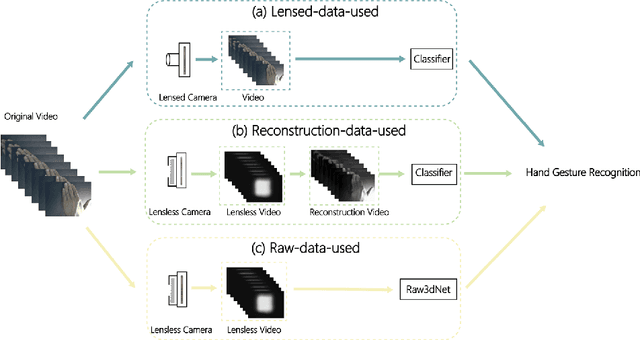
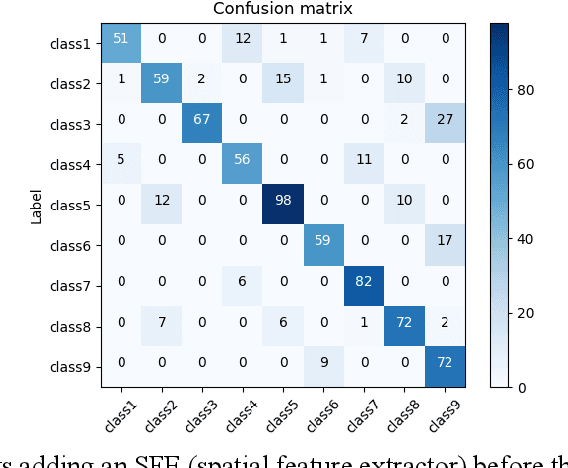
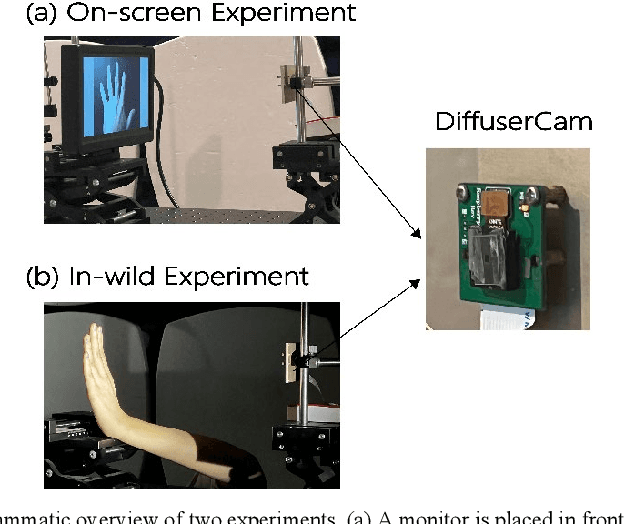

A lensless camera is an imaging system that uses a mask in place of a lens, making it thinner, lighter, and less expensive than a lensed camera. However, additional complex computation and time are required for image reconstruction. This work proposes a deep learning model named Raw3dNet that recognizes hand gestures directly on raw videos captured by a lensless camera without the need for image restoration. In addition to conserving computational resources, the reconstruction-free method provides privacy protection. Raw3dNet is a novel end-to-end deep neural network model for the recognition of hand gestures in lensless imaging systems. It is created specifically for raw video captured by a lensless camera and has the ability to properly extract and combine temporal and spatial features. The network is composed of two stages: 1. spatial feature extractor (SFE), which enhances the spatial features of each frame prior to temporal convolution; 2. 3D-ResNet, which implements spatial and temporal convolution of video streams. The proposed model achieves 98.59% accuracy on the Cambridge Hand Gesture dataset in the lensless optical experiment, which is comparable to the lensed-camera result. Additionally, the feasibility of physical object recognition is assessed. Furtherly, we show that the recognition can be achieved with respectable accuracy using only a tiny portion of the original raw data, indicating the potential for reducing data traffic in cloud computing scenarios.
Origami-inspired soft twisting actuator
Nov 03, 2021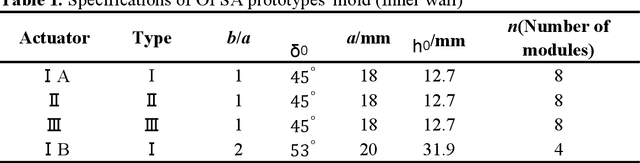
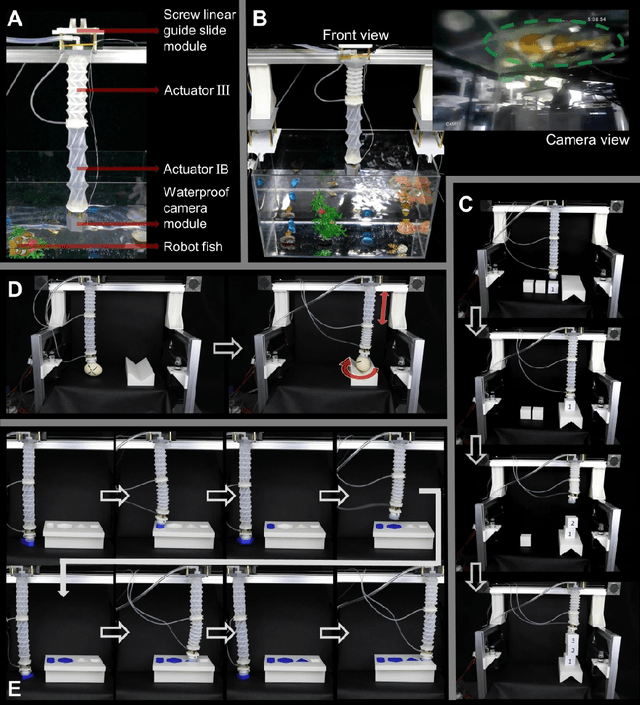
Soft actuators have shown great advantages in compliance and morphology matched for manipulation of delicate objects and inspection in a confined space. There is an unmet need for a soft actuator that can provide torsional motion to e.g. enlarge working space and increase degrees of freedom. Towards this goal, we present origami-inspired soft pneumatic actuators (OSPAs) made from silicone. The prototype can output a rotation of more than one revolution (up to 435{\deg}), larger than previous counterparts. We describe the design and fabrication method, build the kinematics models and simulation models, and analyze and optimize the parameters. Finally, we demonstrate the potentially extensive utility of OSPAs through their integration into a gripper capable of simultaneously grasping and lifting fragile or flat objects, a versatile robot arm capable of picking and placing items at the right angle with the twisting actuators, and a soft snake robot capable of changing attitude and directions by torsion of the twisting actuators.
Learning-based Computer-aided Prescription Model for Parkinson's Disease: A Data-driven Perspective
Jul 31, 2020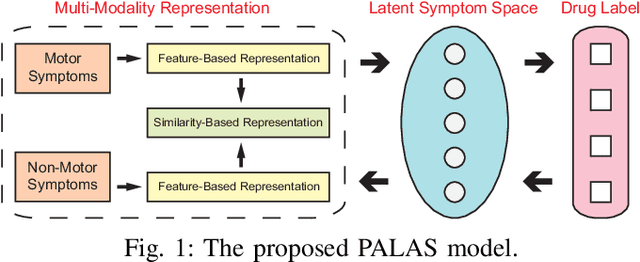
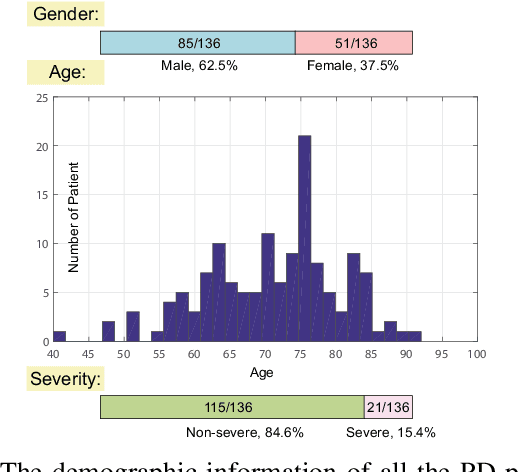
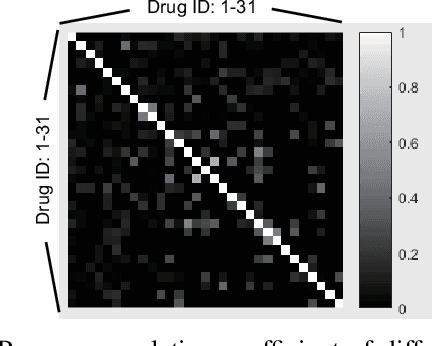
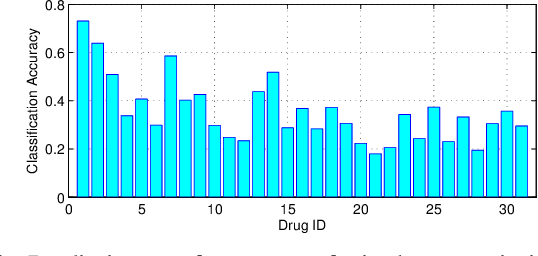
In this paper, we study a novel problem: "automatic prescription recommendation for PD patients." To realize this goal, we first build a dataset by collecting 1) symptoms of PD patients, and 2) their prescription drug provided by neurologists. Then, we build a novel computer-aided prescription model by learning the relation between observed symptoms and prescription drug. Finally, for the new coming patients, we could recommend (predict) suitable prescription drug on their observed symptoms by our prescription model. From the methodology part, our proposed model, namely Prescription viA Learning lAtent Symptoms (PALAS), could recommend prescription using the multi-modality representation of the data. In PALAS, a latent symptom space is learned to better model the relationship between symptoms and prescription drug, as there is a large semantic gap between them. Moreover, we present an efficient alternating optimization method for PALAS. We evaluated our method using the data collected from 136 PD patients at Nanjing Brain Hospital, which can be regarded as a large dataset in PD research community. The experimental results demonstrate the effectiveness and clinical potential of our method in this recommendation task, if compared with other competing methods.