 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrigami-inspired soft twisting actuator
Nov 03, 2021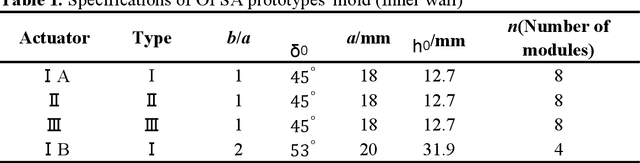
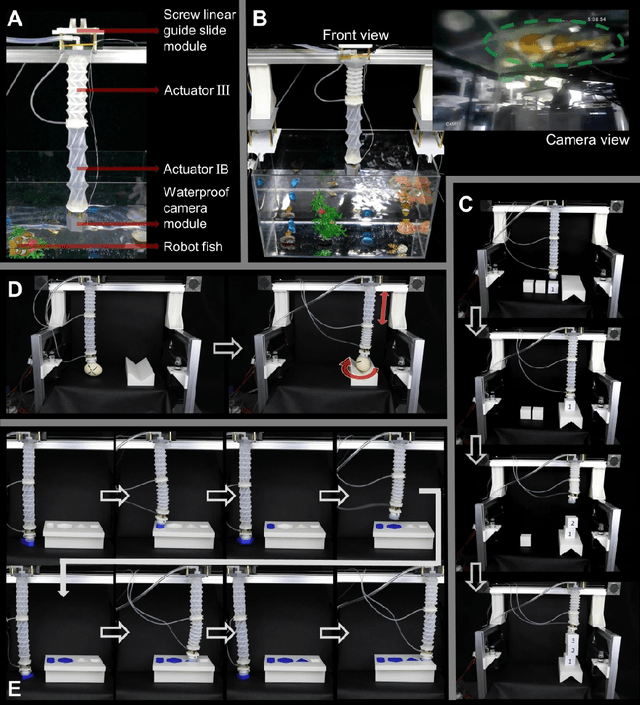
Soft actuators have shown great advantages in compliance and morphology matched for manipulation of delicate objects and inspection in a confined space. There is an unmet need for a soft actuator that can provide torsional motion to e.g. enlarge working space and increase degrees of freedom. Towards this goal, we present origami-inspired soft pneumatic actuators (OSPAs) made from silicone. The prototype can output a rotation of more than one revolution (up to 435{\deg}), larger than previous counterparts. We describe the design and fabrication method, build the kinematics models and simulation models, and analyze and optimize the parameters. Finally, we demonstrate the potentially extensive utility of OSPAs through their integration into a gripper capable of simultaneously grasping and lifting fragile or flat objects, a versatile robot arm capable of picking and placing items at the right angle with the twisting actuators, and a soft snake robot capable of changing attitude and directions by torsion of the twisting actuators.
CRANE: A highly dexterous needle placement robot for evaluation of interventional radiology procedures
Oct 07, 2019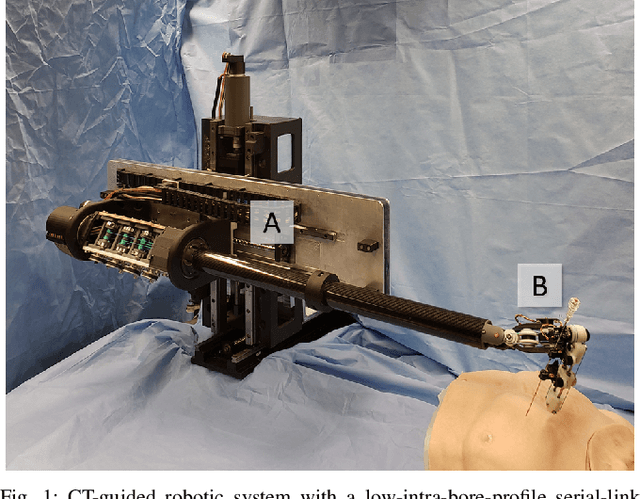
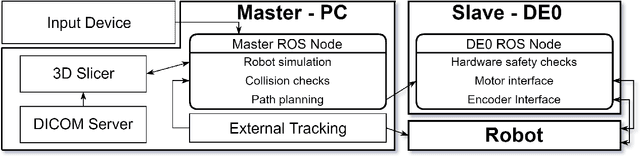
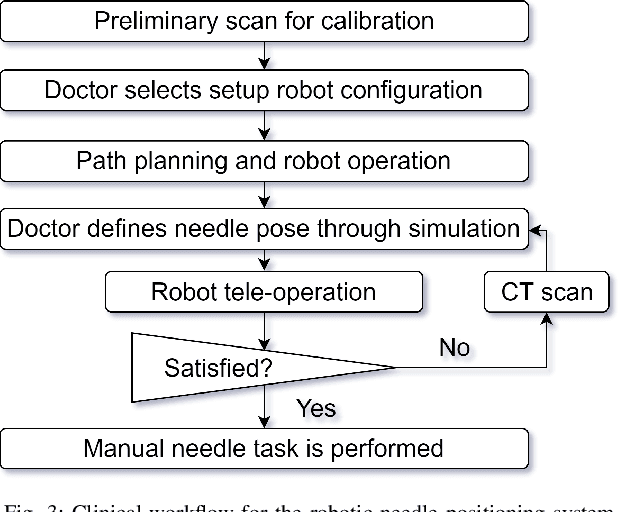
Interventional Radiology (IR) enables earlier diagnosis and less invasive treatment of numerous ailments. Here we present our ongoing development of CRANE: CT RoboticArm and Needle Emplacer, a robotic needle positioning system for CT guided procedures. The robot has 8 active Degrees-of-Freedom (DoF) and a novel infinite travel needle insertion mechanism. The control system is distributed using the RobotOperating System (ROS) across a low latency network that interconnects a real-time low-jitter controller, with a desktop computer which hosts the User Interface (UI) and high-level control. This platform can serve to evaluate limitations in the current procedures and to prototype potential solutions to these challenges in-situ.