 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeC5T5: Controllable Generation of Organic Molecules with Transformers
Aug 23, 2021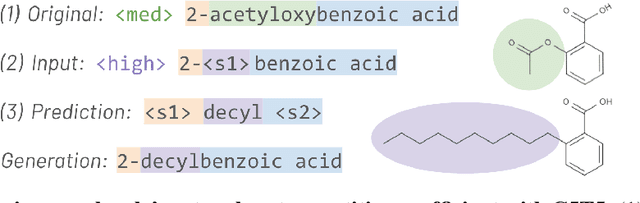
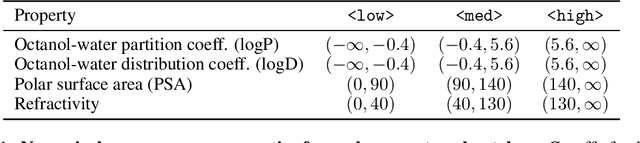
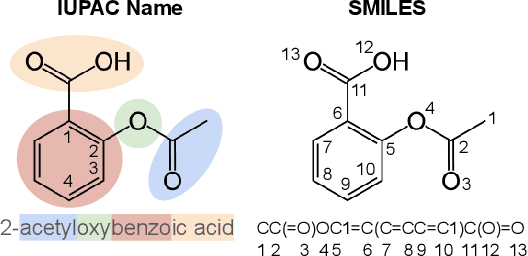
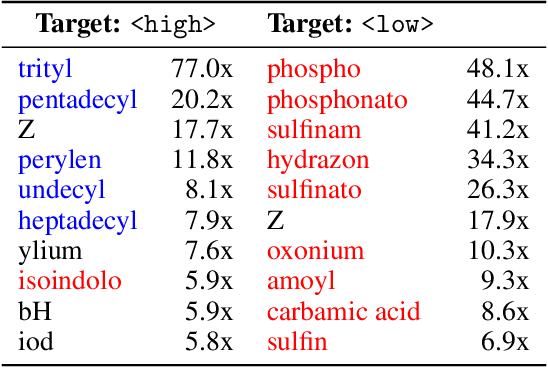
Methods for designing organic materials with desired properties have high potential impact across fields such as medicine, renewable energy, petrochemical engineering, and agriculture. However, using generative modeling to design substances with desired properties is difficult because candidate compounds must satisfy multiple constraints, including synthetic accessibility and other metrics that are intuitive to domain experts but challenging to quantify. We propose C5T5, a novel self-supervised pretraining method that enables transformers to make zero-shot select-and-replace edits, altering organic substances towards desired property values. C5T5 operates on IUPAC names -- a standardized molecular representation that intuitively encodes rich structural information for organic chemists but that has been largely ignored by the ML community. Our technique requires no edited molecule pairs to train and only a rough estimate of molecular properties, and it has the potential to model long-range dependencies and symmetric molecular structures more easily than graph-based methods. C5T5 also provides a powerful interface to domain experts: it grants users fine-grained control over the generative process by selecting and replacing IUPAC name fragments, which enables experts to leverage their intuitions about structure-activity relationships. We demonstrate C5T5's effectiveness on four physical properties relevant for drug discovery, showing that it learns successful and chemically intuitive strategies for altering molecules towards desired property values.
CRANE: A highly dexterous needle placement robot for evaluation of interventional radiology procedures
Oct 07, 2019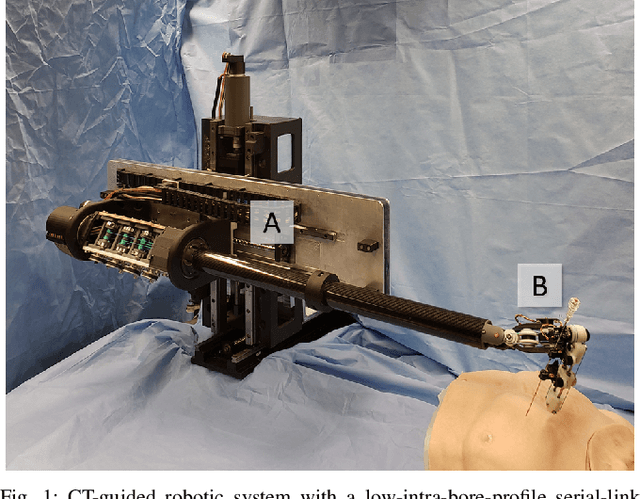
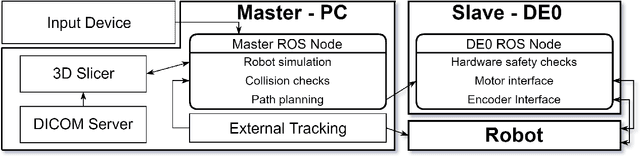
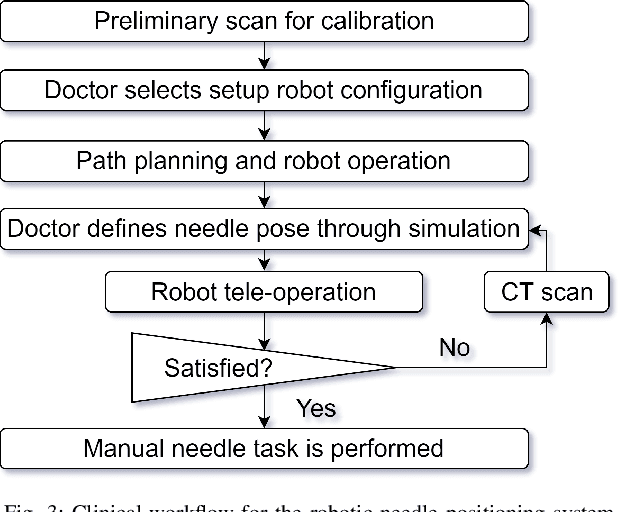
Interventional Radiology (IR) enables earlier diagnosis and less invasive treatment of numerous ailments. Here we present our ongoing development of CRANE: CT RoboticArm and Needle Emplacer, a robotic needle positioning system for CT guided procedures. The robot has 8 active Degrees-of-Freedom (DoF) and a novel infinite travel needle insertion mechanism. The control system is distributed using the RobotOperating System (ROS) across a low latency network that interconnects a real-time low-jitter controller, with a desktop computer which hosts the User Interface (UI) and high-level control. This platform can serve to evaluate limitations in the current procedures and to prototype potential solutions to these challenges in-situ.