Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCRANE: A highly dexterous needle placement robot for evaluation of interventional radiology procedures
Oct 07, 2019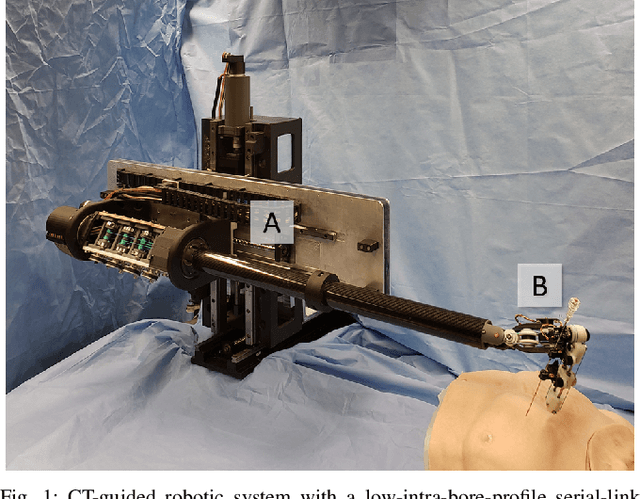
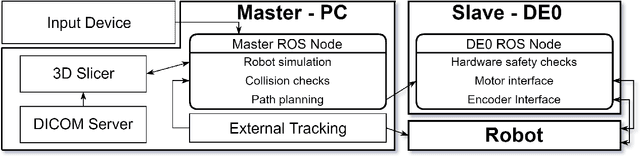
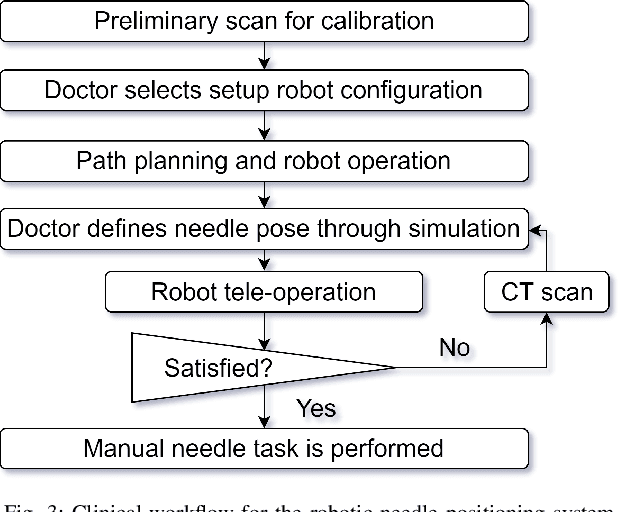
Interventional Radiology (IR) enables earlier diagnosis and less invasive treatment of numerous ailments. Here we present our ongoing development of CRANE: CT RoboticArm and Needle Emplacer, a robotic needle positioning system for CT guided procedures. The robot has 8 active Degrees-of-Freedom (DoF) and a novel infinite travel needle insertion mechanism. The control system is distributed using the RobotOperating System (ROS) across a low latency network that interconnects a real-time low-jitter controller, with a desktop computer which hosts the User Interface (UI) and high-level control. This platform can serve to evaluate limitations in the current procedures and to prototype potential solutions to these challenges in-situ.
* 2 pages, 3 figures, extended abstract for IROS 2019 Workshop on
Surgical Robotics
Via