 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobility Analysis of Screw-Based Locomotion and Propulsion in Various Media
Jan 26, 2023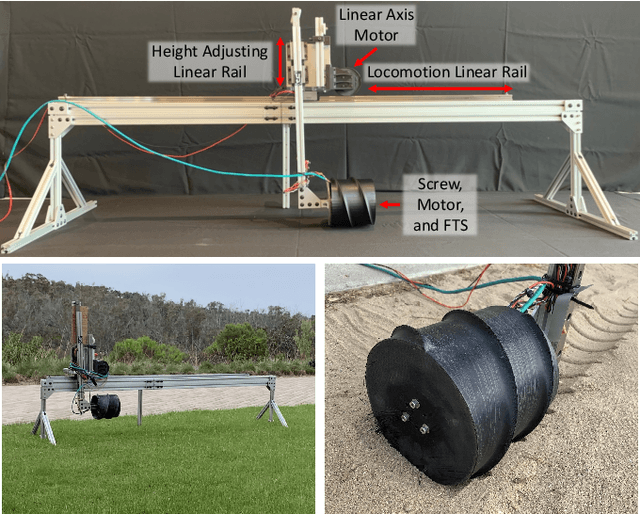
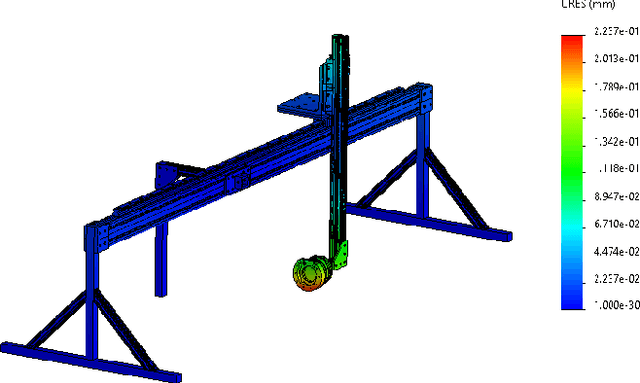

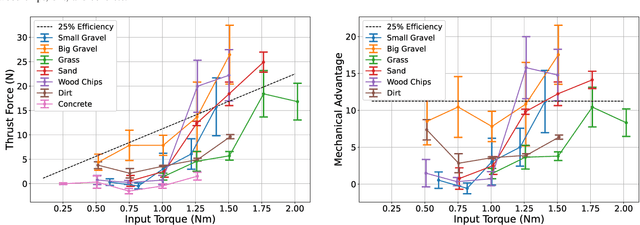
Robots "in-the-wild" encounter and must traverse widely varying terrain, ranging from solid ground to granular materials like sand to full liquids. Numerous approaches exist, including wheeled and legged robots, each excelling in specific domains. Screw-based locomotion is a promising approach for multi-domain mobility, leveraged in exploratory robotic designs, including amphibious vehicles and snake robotics. However, unlike other forms of locomotion, there is a limited exploration of the models, parameter effects, and efficiency for multi-terrain Archimedes screw locomotion. In this work, we present work towards this missing component in understanding screw-based locomotion: comprehensive experimental results and performance analysis across different media. We designed a mobile test bed for indoor and outdoor experimentation to collect this data. Beyond quantitatively showing the multi-domain mobility of screw-based locomotion, we envision future researchers and engineers using the presented results to design effective screw-based locomotion systems.
CRANE: a 10 Degree-of-Freedom, Tele-surgical System for Dexterous Manipulation within Imaging Bores
Sep 28, 2021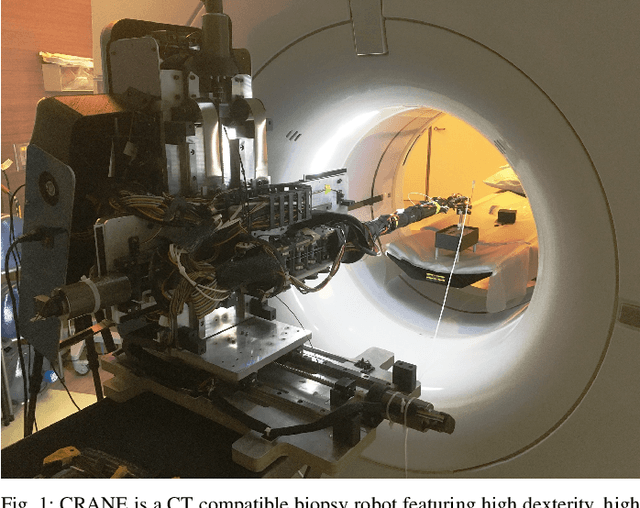
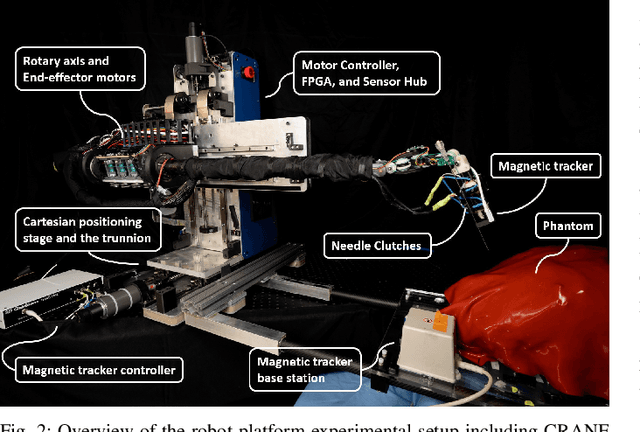
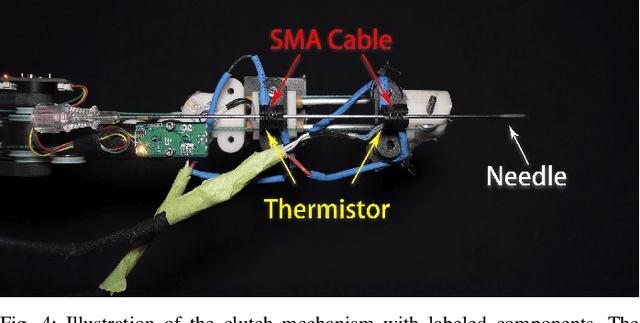
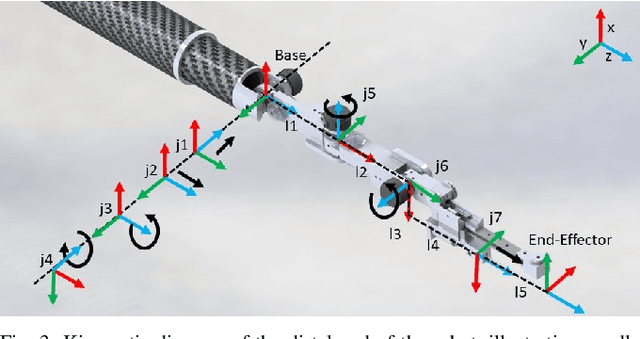
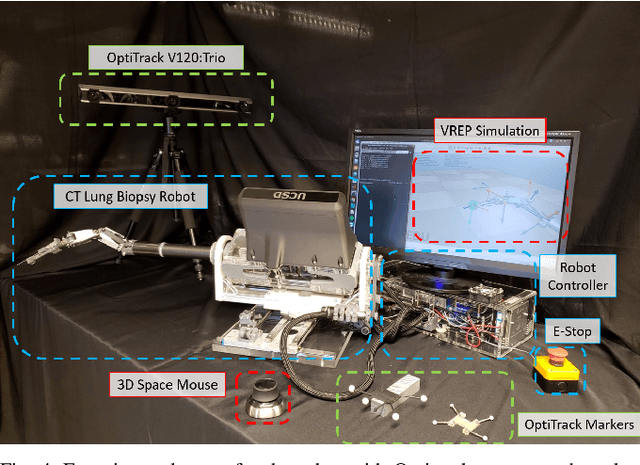
Physicians perform minimally invasive percutaneous procedures under Computed Tomography (CT) image guidance both for the diagnosis and treatment of numerous diseases. For these procedures performed within Computed Tomography Scanners, robots can enable physicians to more accurately target sub-dermal lesions while increasing safety. However, existing robots for this application have limited dexterity, workspace, or accuracy. This paper describes the design, manufacture, and performance of a highly dexterous, low-profile, 8+2 Degree-ofFreedom (DoF) robotic arm for CT guided percutaneous needle biopsy. In this article, we propose CRANE: CT Robot and Needle Emplacer. The design focuses on system dexterity with high accuracy: extending physicians' ability to manipulate and insert needles within the scanner bore while providing the high accuracy possible with a robot. We also propose and validate a system architecture and control scheme for low profile and highly accurate image-guided robotics, that meets the clinical requirements for target accuracy during an in-situ evaluation. The accuracy is additionally evaluated through a trajectory tracking evaluation resulting in <0.2mm and <0.71degree tracking error. Finally, we present a novel needle driving and grasping mechanism with controlling electronics that provides simple manufacturing, sterilization, and adaptability to accommodate different sizes and types of needles.
ARCSnake: An Archimedes' Screw-Propelled, Reconfigurable Robot Snake for Complex Environments
Oct 28, 2019



This paper presents the design and performance of a screw-propelled redundant serpentine robot. This robot comprises serially linked, identical modules, each incorporating an Archimedes' screw for propulsion and a universal joint (U-Joint) for orientation control. When serially chained, these modules form a versatile snake robot platform which enables the robot to reshape its body configuration for varying environments and gait patterns that would be typical of snake movement. Furthermore, the Archimedes' screws allow for novel omni-wheel drive-like motions by speed controlling their screw threads. This paper considers the mechanical and electrical design, as well as the software architecture for realizing a fully integrated system. The system includes 3$N$ actuators for $N$ segments, each controlled using a BeagleBone Black with a customized power-electronics cape, a 9 Degrees of Freedom (DoF) Inertial Measurement Unit (IMU), and a scalable communication channel over ROS. The intended application for this robot is its use as an instrumentation mobility platform on terrestrial planets where the terrain may involve vents, caves, ice, and rocky surfaces. Additional experiments are shown on our website.
CRANE: A highly dexterous needle placement robot for evaluation of interventional radiology procedures
Oct 07, 2019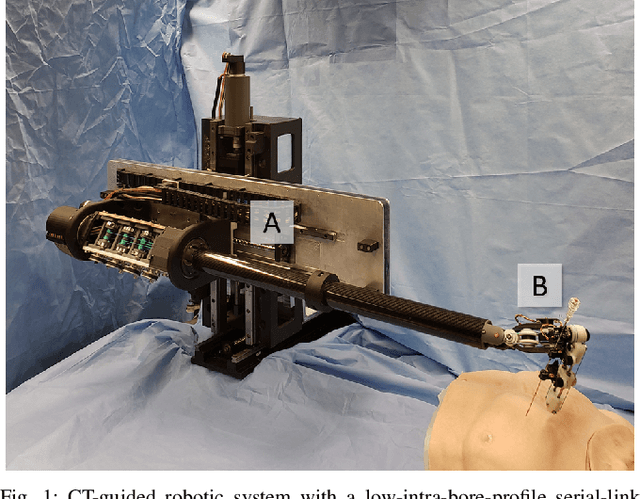
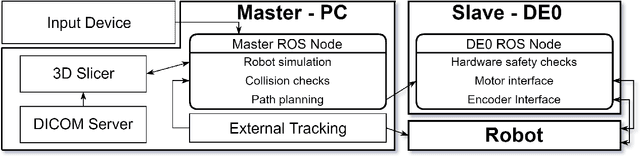
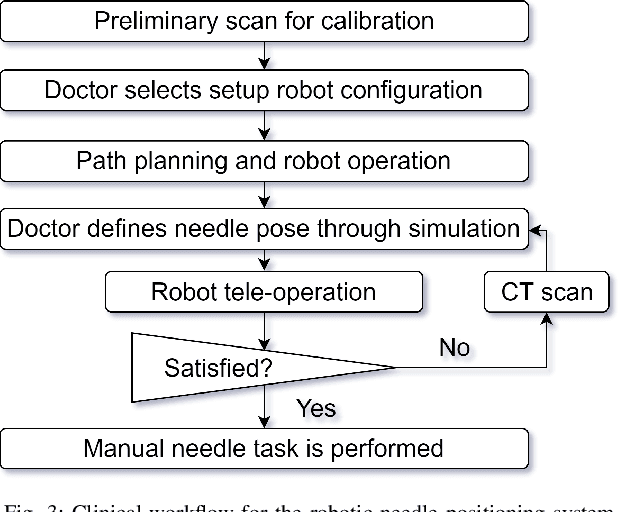
Interventional Radiology (IR) enables earlier diagnosis and less invasive treatment of numerous ailments. Here we present our ongoing development of CRANE: CT RoboticArm and Needle Emplacer, a robotic needle positioning system for CT guided procedures. The robot has 8 active Degrees-of-Freedom (DoF) and a novel infinite travel needle insertion mechanism. The control system is distributed using the RobotOperating System (ROS) across a low latency network that interconnects a real-time low-jitter controller, with a desktop computer which hosts the User Interface (UI) and high-level control. This platform can serve to evaluate limitations in the current procedures and to prototype potential solutions to these challenges in-situ.
An Open-Source 7-Axis, Robotic Platform to Enable Dexterous Procedures within CT Scanners
Mar 11, 2019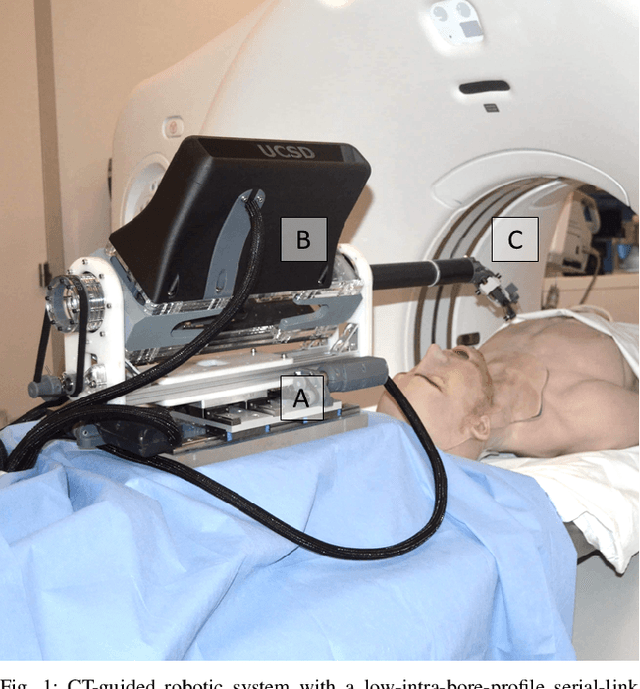
This paper describes the design, manufacture, and performance of a highly dexterous, low-profile, 7 Degree-of-Freedom (DOF) robotic arm for CT-guided percutaneous needle biopsy. Direct CT guidance allows physicians to localize tumours quickly; however, needle insertion is still performed by hand. This system is mounted to a fully active gantry superior to the patient's head and teleoperated by a radiologist. Unlike other similar robots, this robot's fully serial-link approach uses a unique combination of belt and cable drives for high-transparency and minimal-backlash, allowing for an expansive working area and numerous approach angles to targets all while maintaining a small in-bore cross-section of less than $16cm^2$. Simulations verified the system's expansive collision free work-space and ability to hit targets across the entire chest, as required for lung cancer biopsy. Targeting error is on average $<1mm$ on a teleoperated accuracy task, illustrating the system's sufficient accuracy to perform biopsy procedures. The system is designed for lung biopsies due to the large working volume that is required for reaching peripheral lung lesions, though, with its large working volume and small in-bore cross-sectional area, the robotic system is effectively a general-purpose CT-compatible manipulation device for percutaneous procedures. Finally, with the considerable development time undertaken in designing a precise and flexible-use system and with the desire to reduce the burden of other researchers in developing algorithms for image-guided surgery, this system provides open-access, and to the best of our knowledge, is the first open-hardware image-guided biopsy robot of its kind.