 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARCSnake V2: An Amphibious Multi-Domain Screw-Propelled Snake-Like Robot
Nov 15, 2025Robotic exploration in extreme environments such as caves, oceans, and planetary surfaces pose significant challenges, particularly in locomotion across diverse terrains. Conventional wheeled or legged robots often struggle in these contexts due to surface variability. This paper presents ARCSnake V2, an amphibious, screw propelled, snake like robot designed for teleoperated or autonomous locomotion across land, granular media, and aquatic environments. ARCSnake V2 combines the high mobility of hyper redundant snake robots with the terrain versatility of Archimedean screw propulsion. Key contributions include a water sealed mechanical design with serially linked screw and joint actuation, an integrated buoyancy control system, and teleoperation via a kinematically matched handheld controller. The robots design and control architecture enable multiple locomotion modes screwing, wheeling, and sidewinding with smooth transitions between them. Extensive experiments validate its underwater maneuverability, communication robustness, and force regulated actuation. These capabilities position ARCSnake V2 as a versatile platform for exploration, search and rescue, and environmental monitoring in multi domain settings.
SURESTEP: An Uncertainty-Aware Trajectory Optimization Framework to Enhance Visual Tool Tracking for Robust Surgical Automation
Mar 29, 2024Inaccurate tool localization is one of the main reasons for failures in automating surgical tasks. Imprecise robot kinematics and noisy observations caused by the poor visual acuity of an endoscopic camera make tool tracking challenging. Previous works in surgical automation adopt environment-specific setups or hard-coded strategies instead of explicitly considering motion and observation uncertainty of tool tracking in their policies. In this work, we present SURESTEP, an uncertainty-aware trajectory optimization framework for robust surgical automation. We model the uncertainty of tool tracking with the components motivated by the sources of noise in typical surgical scenes. Using a Gaussian assumption to propagate our uncertainty models through a given tool trajectory, SURESTEP provides a general framework that minimizes the upper bound on the entropy of the final estimated tool distribution. We compare SURESTEP with a baseline method on a real-world suture needle regrasping task under challenging environmental conditions, such as poor lighting and a moving endoscopic camera. The results over 60 regrasps on the da Vinci Research Kit (dVRK) demonstrate that our optimized trajectories significantly outperform the un-optimized baseline.
NASU -- Novel Actuating Screw Unit: Origami-inspired Screw-based Propulsion on Mobile Ground Robots
Sep 29, 2023
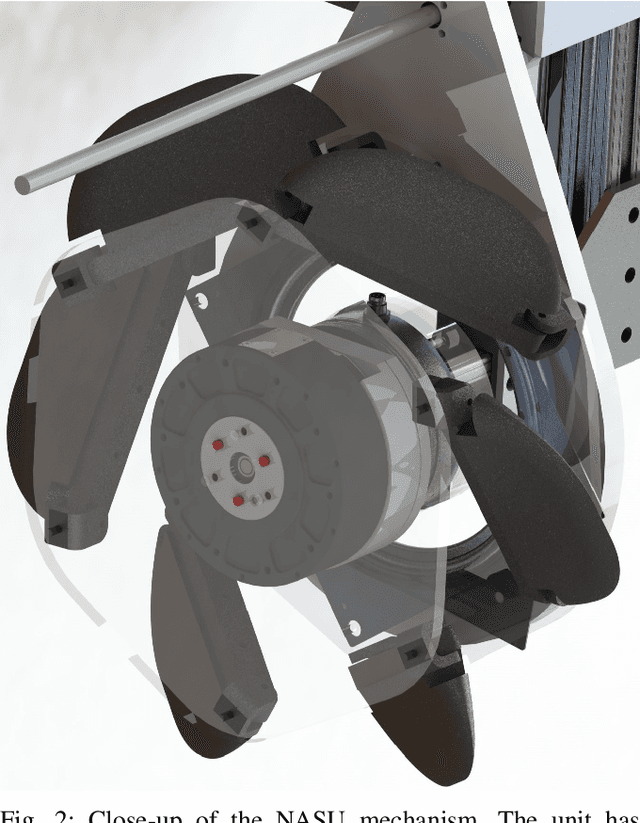
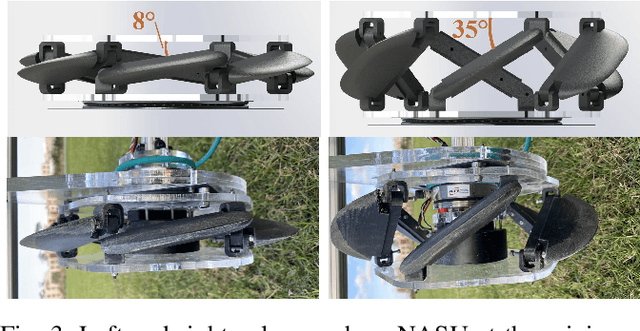
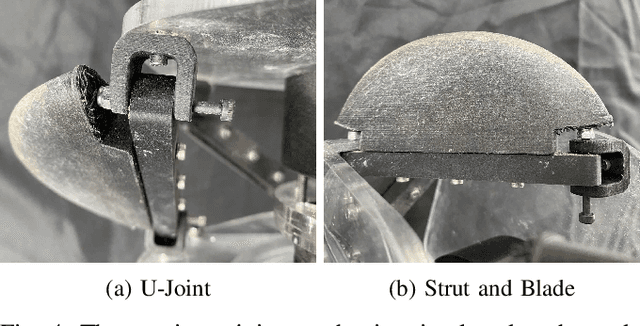
Screw-based locomotion is a robust method of locomotion across a wide range of media including water, sand, and gravel. A challenge with screws is their significant number of impactful design parameters that affect locomotion performance in varying environments. One crucial parameter is the angle of attack, also referred to as the lead angle. The angle of attack has a significant impact on the screw's performance as it creates a trade-off between efficiency and forward velocity. This trend is consistent across various types of media. In this work, we present a Novel Actuating Screw Unit. It is the first screw-based propulsion design that enables the reconfiguration of the angle of attack dynamically for optimized locomotion across multiple media. The design is inspired by the kresling unit, which is a widespread mechanism in origami robotics, and the angle of attack is adjusted with a linear actuator, while the entire unit is spun on its axis as an archimedean screw. NASU is integrated onto a mobile test-bed and experiments are conducted in a large variety of media including gravel, grass, and sand. Our experiments show the proposed design is a promising direction for reconfigurable screws by allowing control to optimize for efficiency or velocity.
Mobility Analysis of Screw-Based Locomotion and Propulsion in Various Media
Jan 26, 2023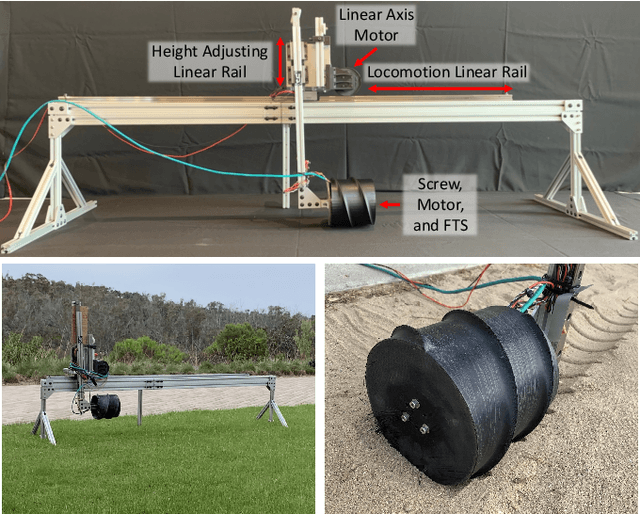
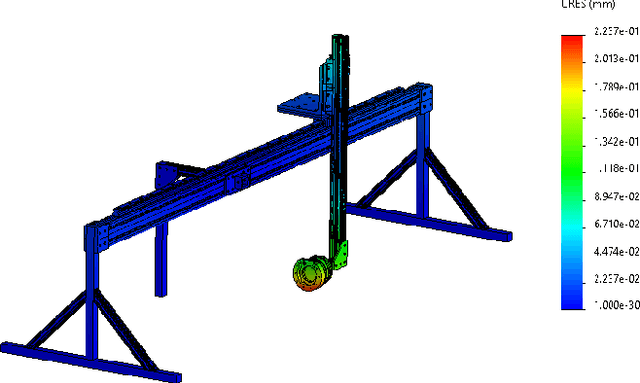

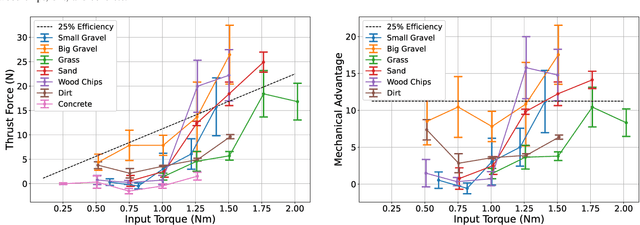
Robots "in-the-wild" encounter and must traverse widely varying terrain, ranging from solid ground to granular materials like sand to full liquids. Numerous approaches exist, including wheeled and legged robots, each excelling in specific domains. Screw-based locomotion is a promising approach for multi-domain mobility, leveraged in exploratory robotic designs, including amphibious vehicles and snake robotics. However, unlike other forms of locomotion, there is a limited exploration of the models, parameter effects, and efficiency for multi-terrain Archimedes screw locomotion. In this work, we present work towards this missing component in understanding screw-based locomotion: comprehensive experimental results and performance analysis across different media. We designed a mobile test bed for indoor and outdoor experimentation to collect this data. Beyond quantitatively showing the multi-domain mobility of screw-based locomotion, we envision future researchers and engineers using the presented results to design effective screw-based locomotion systems.