 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaptic Shoulder for Rendering Biomechanically Accurate Joint Limits for Human-Robot Physical Interactions
Sep 20, 2024Human-robot physical interaction (pHRI) is a rapidly evolving research field with significant implications for physical therapy, search and rescue, and telemedicine. However, a major challenge lies in accurately understanding human constraints and safety in human-robot physical experiments without an IRB and physical human experiments. Concerns regarding human studies include safety concerns, repeatability, and scalability of the number and diversity of participants. This paper examines whether a physical approximation can serve as a stand-in for human subjects to enhance robot autonomy for physical assistance. This paper introduces the SHULDRD (Shoulder Haptic Universal Limb Dynamic Repositioning Device), an economical and anatomically similar device designed for real-time testing and deployment of pHRI planning tasks onto robots in the real world. SHULDRD replicates human shoulder motion, providing crucial force feedback and safety data. The device's open-source CAD and software facilitate easy construction and use, ensuring broad accessibility for researchers. By providing a flexible platform able to emulate infinite human subjects, ensure repeatable trials, and provide quantitative metrics to assess the effectiveness of the robotic intervention, SHULDRD aims to improve the safety and efficacy of human-robot physical interactions.
NASU -- Novel Actuating Screw Unit: Origami-inspired Screw-based Propulsion on Mobile Ground Robots
Sep 29, 2023
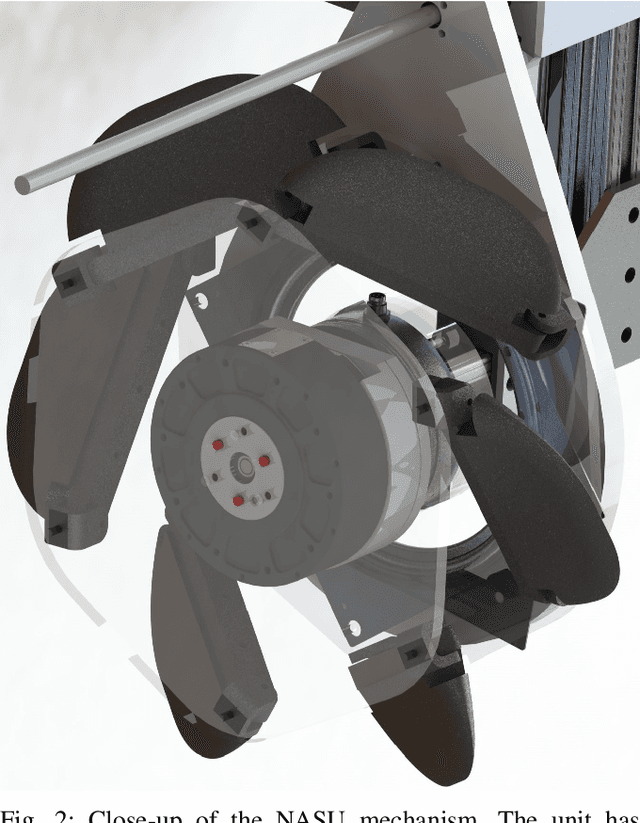
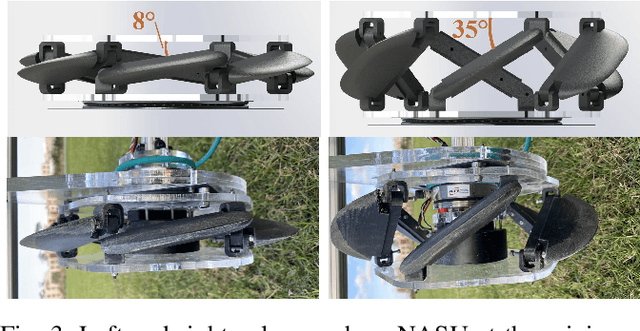
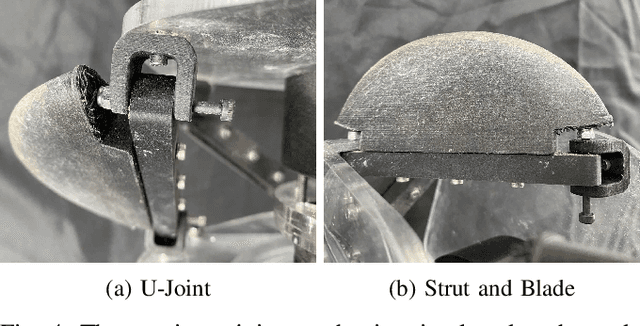
Screw-based locomotion is a robust method of locomotion across a wide range of media including water, sand, and gravel. A challenge with screws is their significant number of impactful design parameters that affect locomotion performance in varying environments. One crucial parameter is the angle of attack, also referred to as the lead angle. The angle of attack has a significant impact on the screw's performance as it creates a trade-off between efficiency and forward velocity. This trend is consistent across various types of media. In this work, we present a Novel Actuating Screw Unit. It is the first screw-based propulsion design that enables the reconfiguration of the angle of attack dynamically for optimized locomotion across multiple media. The design is inspired by the kresling unit, which is a widespread mechanism in origami robotics, and the angle of attack is adjusted with a linear actuator, while the entire unit is spun on its axis as an archimedean screw. NASU is integrated onto a mobile test-bed and experiments are conducted in a large variety of media including gravel, grass, and sand. Our experiments show the proposed design is a promising direction for reconfigurable screws by allowing control to optimize for efficiency or velocity.