 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobility Analysis of Screw-Based Locomotion and Propulsion in Various Media
Jan 26, 2023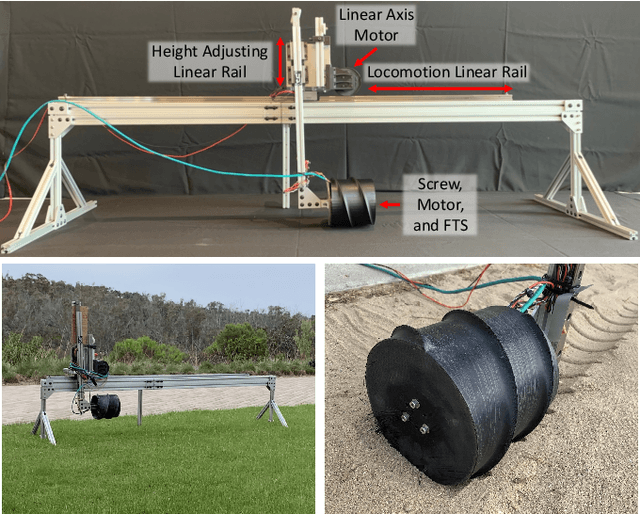

Robots "in-the-wild" encounter and must traverse widely varying terrain, ranging from solid ground to granular materials like sand to full liquids. Numerous approaches exist, including wheeled and legged robots, each excelling in specific domains. Screw-based locomotion is a promising approach for multi-domain mobility, leveraged in exploratory robotic designs, including amphibious vehicles and snake robotics. However, unlike other forms of locomotion, there is a limited exploration of the models, parameter effects, and efficiency for multi-terrain Archimedes screw locomotion. In this work, we present work towards this missing component in understanding screw-based locomotion: comprehensive experimental results and performance analysis across different media. We designed a mobile test bed for indoor and outdoor experimentation to collect this data. Beyond quantitatively showing the multi-domain mobility of screw-based locomotion, we envision future researchers and engineers using the presented results to design effective screw-based locomotion systems.