 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobility Analysis of Screw-Based Locomotion and Propulsion in Various Media
Jan 26, 2023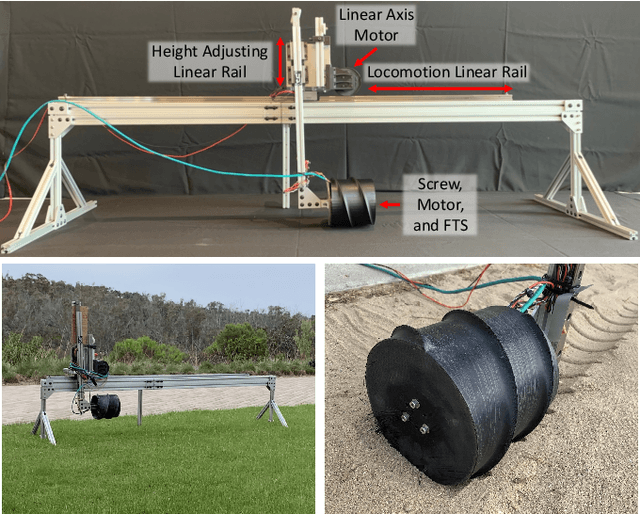
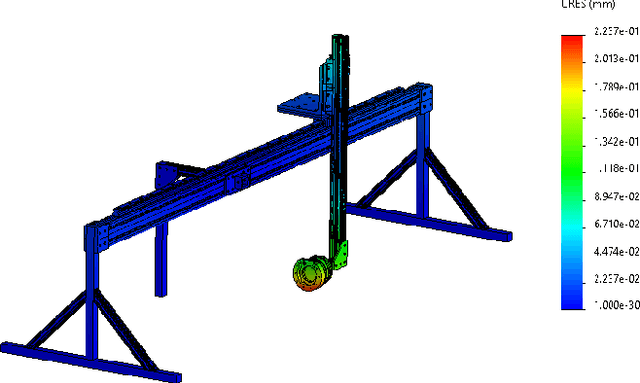

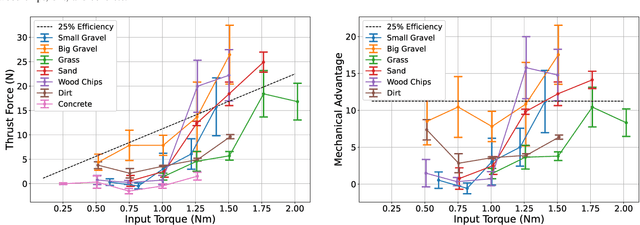
Robots "in-the-wild" encounter and must traverse widely varying terrain, ranging from solid ground to granular materials like sand to full liquids. Numerous approaches exist, including wheeled and legged robots, each excelling in specific domains. Screw-based locomotion is a promising approach for multi-domain mobility, leveraged in exploratory robotic designs, including amphibious vehicles and snake robotics. However, unlike other forms of locomotion, there is a limited exploration of the models, parameter effects, and efficiency for multi-terrain Archimedes screw locomotion. In this work, we present work towards this missing component in understanding screw-based locomotion: comprehensive experimental results and performance analysis across different media. We designed a mobile test bed for indoor and outdoor experimentation to collect this data. Beyond quantitatively showing the multi-domain mobility of screw-based locomotion, we envision future researchers and engineers using the presented results to design effective screw-based locomotion systems.
ARCSnake: Reconfigurable Snake-Like Robot with Archimedean Screw Propulsion for Multi-Domain Mobility
Jul 30, 2021
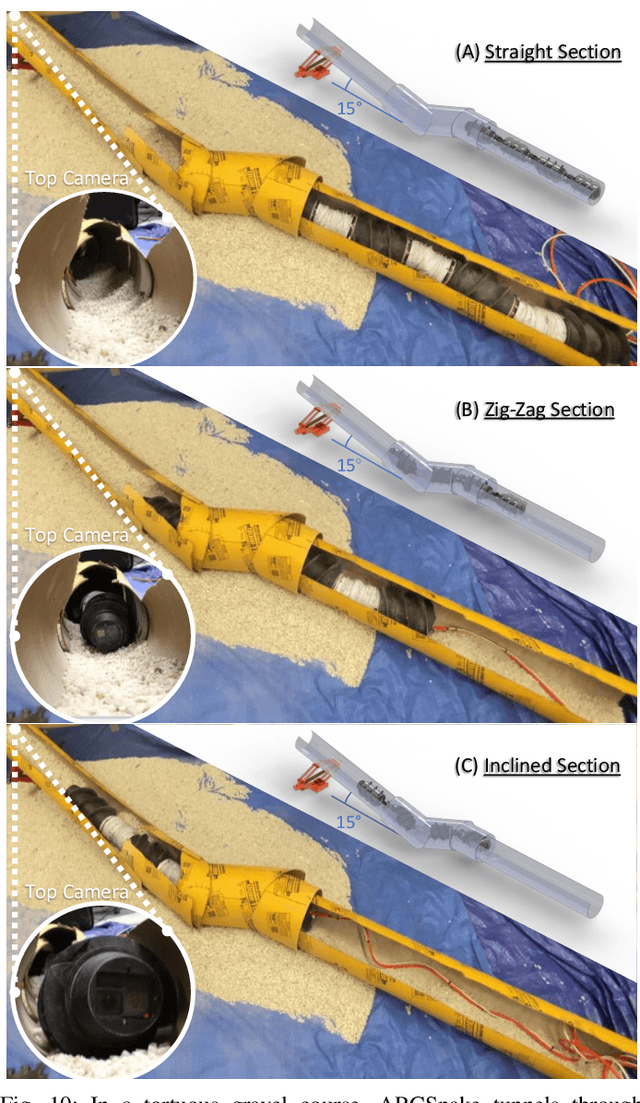

Exploring and navigating in extreme environments, such as caves, oceans, and planetary bodies, are often too hazardous for humans, and as such, robots are possible surrogates. These robots are met with significant locomotion challenges that require traversing a wide range of surface roughnesses and topologies. Previous locomotion strategies, involving wheels or ambulatory motion, such as snake platforms, have success on specific surfaces but fail in others which could be detrimental in exploration and navigation missions. In this paper, we present a novel approach that combines snake-like robots with an Archimedean screw locomotion mechanism to provide multiple, effective mobility strategies in a large range of environments, including those that are difficult to traverse for wheeled and ambulatory robots. This work develops a robotic system called ARCSnake to demonstrate this locomotion principle and tested it in a variety of different terrains and environments in order to prove its controllable, multi-domain, navigation capabilities. These tests show a wide breadth of scenarios that ARCSnake can handle, hence demonstrating its ability to traverse through extreme terrains.
ARCSnake: An Archimedes' Screw-Propelled, Reconfigurable Robot Snake for Complex Environments
Oct 28, 2019



This paper presents the design and performance of a screw-propelled redundant serpentine robot. This robot comprises serially linked, identical modules, each incorporating an Archimedes' screw for propulsion and a universal joint (U-Joint) for orientation control. When serially chained, these modules form a versatile snake robot platform which enables the robot to reshape its body configuration for varying environments and gait patterns that would be typical of snake movement. Furthermore, the Archimedes' screws allow for novel omni-wheel drive-like motions by speed controlling their screw threads. This paper considers the mechanical and electrical design, as well as the software architecture for realizing a fully integrated system. The system includes 3$N$ actuators for $N$ segments, each controlled using a BeagleBone Black with a customized power-electronics cape, a 9 Degrees of Freedom (DoF) Inertial Measurement Unit (IMU), and a scalable communication channel over ROS. The intended application for this robot is its use as an instrumentation mobility platform on terrestrial planets where the terrain may involve vents, caves, ice, and rocky surfaces. Additional experiments are shown on our website.