 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Based Observer Design: A Framework for Lightweight Sensor Fusion
Oct 01, 2025



Efficient observer design and accurate sensor fusion are key in state estimation. This work proposes an optimization-based methodology, termed Trajectory Based Optimization Design (TBOD), allowing the user to easily design observers for general nonlinear systems and multi-sensor setups. Starting from parametrized observer dynamics, the proposed method considers a finite set of pre-recorded measurement trajectories from the nominal plant and exploits them to tune the observer parameters through numerical optimization. This research hinges on the classic observer's theory and Moving Horizon Estimators methodology. Optimization is exploited to ease the observer's design, providing the user with a lightweight, general-purpose sensor fusion methodology. TBOD's main characteristics are the capability to handle general sensors efficiently and in a modular way and, most importantly, its straightforward tuning procedure. The TBOD's performance is tested on a terrestrial rover localization problem, combining IMU and ranging sensors provided by Ultra Wide Band antennas, and validated through a motion-capture system. Comparison with an Extended Kalman Filter is also provided, matching its position estimation accuracy and significantly improving in the orientation.
ARCSnake: Reconfigurable Snake-Like Robot with Archimedean Screw Propulsion for Multi-Domain Mobility
Jul 30, 2021
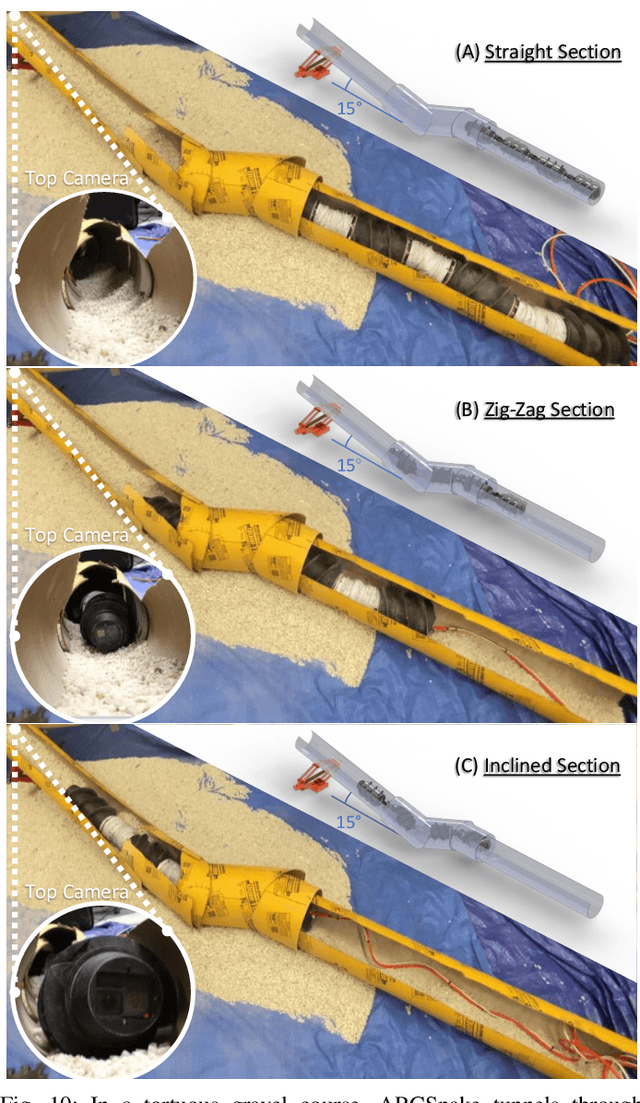

Exploring and navigating in extreme environments, such as caves, oceans, and planetary bodies, are often too hazardous for humans, and as such, robots are possible surrogates. These robots are met with significant locomotion challenges that require traversing a wide range of surface roughnesses and topologies. Previous locomotion strategies, involving wheels or ambulatory motion, such as snake platforms, have success on specific surfaces but fail in others which could be detrimental in exploration and navigation missions. In this paper, we present a novel approach that combines snake-like robots with an Archimedean screw locomotion mechanism to provide multiple, effective mobility strategies in a large range of environments, including those that are difficult to traverse for wheeled and ambulatory robots. This work develops a robotic system called ARCSnake to demonstrate this locomotion principle and tested it in a variety of different terrains and environments in order to prove its controllable, multi-domain, navigation capabilities. These tests show a wide breadth of scenarios that ARCSnake can handle, hence demonstrating its ability to traverse through extreme terrains.