 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCRANE: a 10 Degree-of-Freedom, Tele-surgical System for Dexterous Manipulation within Imaging Bores
Sep 28, 2021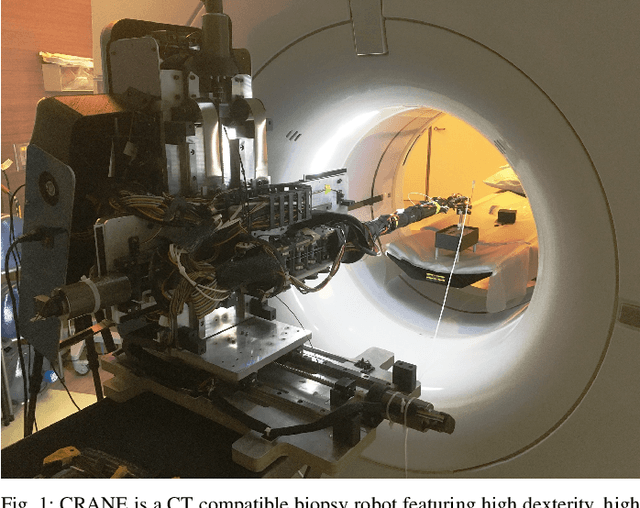
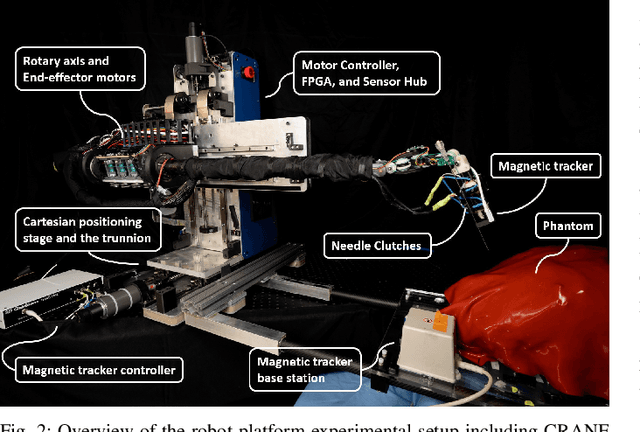
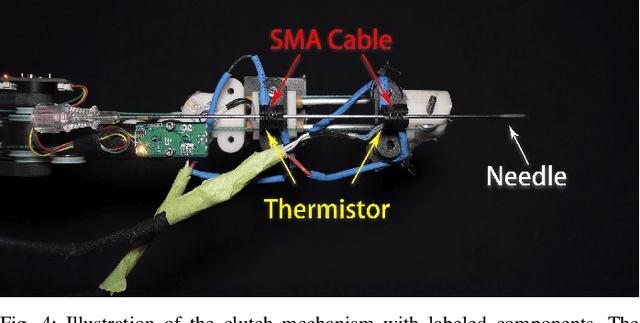
Physicians perform minimally invasive percutaneous procedures under Computed Tomography (CT) image guidance both for the diagnosis and treatment of numerous diseases. For these procedures performed within Computed Tomography Scanners, robots can enable physicians to more accurately target sub-dermal lesions while increasing safety. However, existing robots for this application have limited dexterity, workspace, or accuracy. This paper describes the design, manufacture, and performance of a highly dexterous, low-profile, 8+2 Degree-ofFreedom (DoF) robotic arm for CT guided percutaneous needle biopsy. In this article, we propose CRANE: CT Robot and Needle Emplacer. The design focuses on system dexterity with high accuracy: extending physicians' ability to manipulate and insert needles within the scanner bore while providing the high accuracy possible with a robot. We also propose and validate a system architecture and control scheme for low profile and highly accurate image-guided robotics, that meets the clinical requirements for target accuracy during an in-situ evaluation. The accuracy is additionally evaluated through a trajectory tracking evaluation resulting in <0.2mm and <0.71degree tracking error. Finally, we present a novel needle driving and grasping mechanism with controlling electronics that provides simple manufacturing, sterilization, and adaptability to accommodate different sizes and types of needles.
CRANE: A highly dexterous needle placement robot for evaluation of interventional radiology procedures
Oct 07, 2019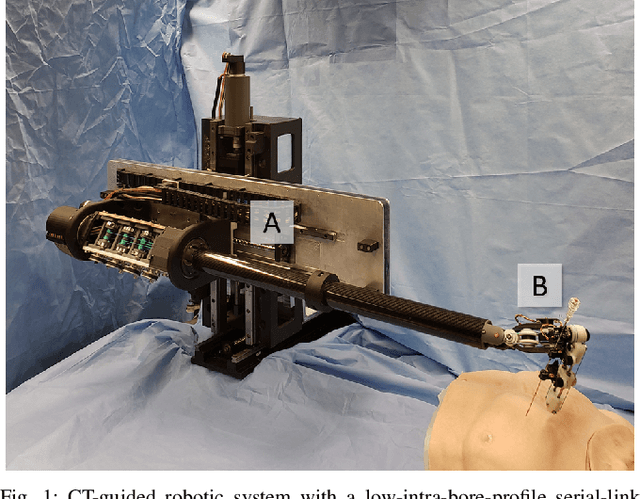
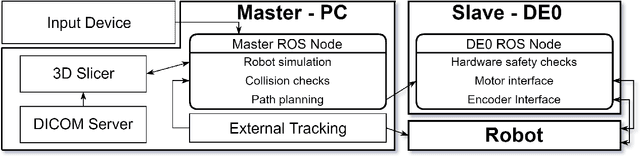
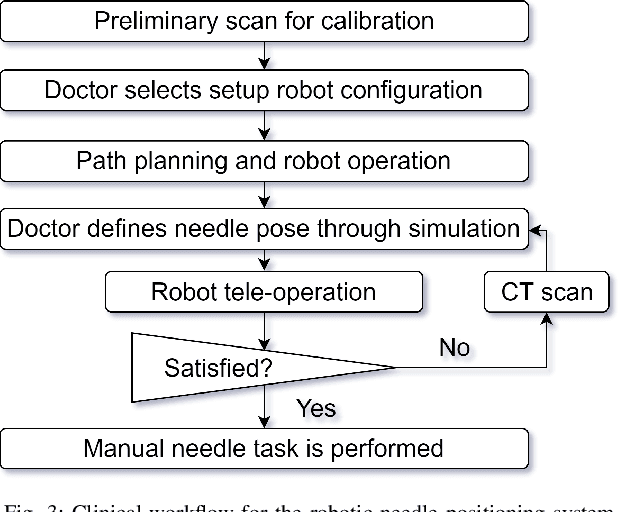
Interventional Radiology (IR) enables earlier diagnosis and less invasive treatment of numerous ailments. Here we present our ongoing development of CRANE: CT RoboticArm and Needle Emplacer, a robotic needle positioning system for CT guided procedures. The robot has 8 active Degrees-of-Freedom (DoF) and a novel infinite travel needle insertion mechanism. The control system is distributed using the RobotOperating System (ROS) across a low latency network that interconnects a real-time low-jitter controller, with a desktop computer which hosts the User Interface (UI) and high-level control. This platform can serve to evaluate limitations in the current procedures and to prototype potential solutions to these challenges in-situ.