 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniDex: A Robot Foundation Suite for Universal Dexterous Hand Control from Egocentric Human Videos
Mar 23, 2026Dexterous manipulation remains challenging due to the cost of collecting real-robot teleoperation data, the heterogeneity of hand embodiments, and the high dimensionality of control. We present UniDex, a robot foundation suite that couples a large-scale robot-centric dataset with a unified vision-language-action (VLA) policy and a practical human-data capture setup for universal dexterous hand control. First, we construct UniDex-Dataset, a robot-centric dataset over 50K trajectories across eight dexterous hands (6--24 DoFs), derived from egocentric human video datasets. To transform human data into robot-executable trajectories, we employ a human-in-the-loop retargeting procedure to align fingertip trajectories while preserving plausible hand-object contacts, and we operate on explicit 3D pointclouds with human hands masked to narrow kinematic and visual gaps. Second, we introduce the Function-Actuator-Aligned Space (FAAS), a unified action space that maps functionally similar actuators to shared coordinates, enabling cross-hand transfer. Leveraging FAAS as the action parameterization, we train UniDex-VLA, a 3D VLA policy pretrained on UniDex-Dataset and finetuned with task demonstrations. In addition, we build UniDex-Cap, a simple portable capture setup that records synchronized RGB-D streams and human hand poses and converts them into robot-executable trajectories to enable human-robot data co-training that reduces reliance on costly robot demonstrations. On challenging tool-use tasks across two different hands, UniDex-VLA achieves 81% average task progress and outperforms prior VLA baselines by a large margin, while exhibiting strong spatial, object, and zero-shot cross-hand generalization. Together, UniDex-Dataset, UniDex-VLA, and UniDex-Cap provide a scalable foundation suite for universal dexterous manipulation.
Seeing Clearly without Training: Mitigating Hallucinations in Multimodal LLMs for Remote Sensing
Mar 03, 2026Multimodal large language models (MLLMs) suffer from pronounced hallucinations in remote sensing visual question-answering (RS-VQA), primarily caused by visual grounding failures in large-scale scenes or misinterpretation of fine-grained small targets. To systematically analyze these issues, we introduce RSHBench, a protocol-based benchmark for fine-grained diagnosis of factual and logical hallucinations. To mitigate grounding-induced factual hallucinations, we further propose Relative Attention-Driven Actively Reasoning (RADAR), a training-free inference method that leverages intrinsic attention in MLLMs to guide progressive localization and fine-grained local reasoning at test time. Extensive experiments across diverse MLLMs demonstrate that RADAR consistently improves RS-VQA performance and reduces both factual and logical hallucinations. Code and data will be publicly available at: https://github.com/MiliLab/RADAR
ASTRA: Automated Synthesis of agentic Trajectories and Reinforcement Arenas
Jan 29, 2026Large language models (LLMs) are increasingly used as tool-augmented agents for multi-step decision making, yet training robust tool-using agents remains challenging. Existing methods still require manual intervention, depend on non-verifiable simulated environments, rely exclusively on either supervised fine-tuning (SFT) or reinforcement learning (RL), and struggle with stable long-horizon, multi-turn learning. To address these challenges, we introduce ASTRA, a fully automated end-to-end framework for training tool-augmented language model agents via scalable data synthesis and verifiable reinforcement learning. ASTRA integrates two complementary components. First, a pipeline that leverages the static topology of tool-call graphs synthesizes diverse, structurally grounded trajectories, instilling broad and transferable tool-use competence. Second, an environment synthesis framework that captures the rich, compositional topology of human semantic reasoning converts decomposed question-answer traces into independent, code-executable, and rule-verifiable environments, enabling deterministic multi-turn RL. Based on this method, we develop a unified training methodology that integrates SFT with online RL using trajectory-level rewards to balance task completion and interaction efficiency. Experiments on multiple agentic tool-use benchmarks demonstrate that ASTRA-trained models achieve state-of-the-art performance at comparable scales, approaching closed-source systems while preserving core reasoning ability. We release the full pipelines, environments, and trained models at https://github.com/LianjiaTech/astra.
Zero-Shot Metric Depth Estimation via Monocular Visual-Inertial Rescaling for Autonomous Aerial Navigation
Sep 09, 2025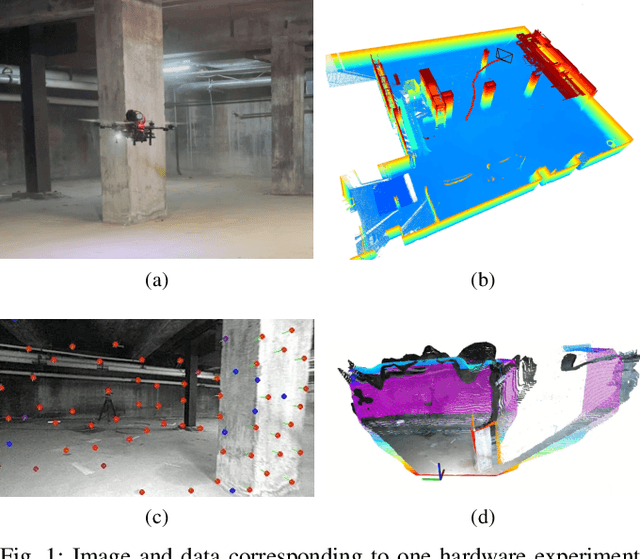
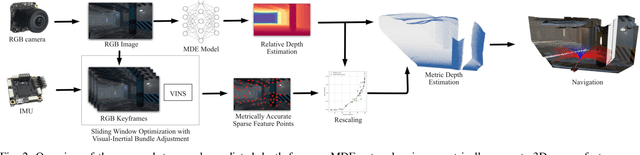
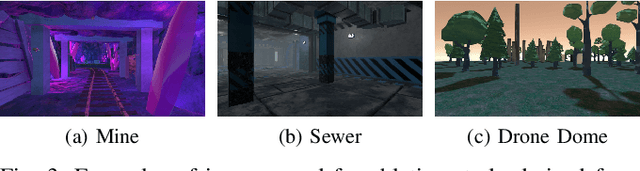
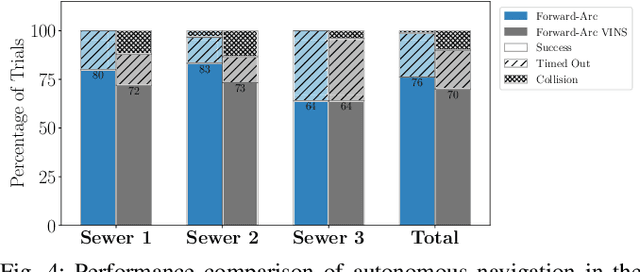
This paper presents a methodology to predict metric depth from monocular RGB images and an inertial measurement unit (IMU). To enable collision avoidance during autonomous flight, prior works either leverage heavy sensors (e.g., LiDARs or stereo cameras) or data-intensive and domain-specific fine-tuning of monocular metric depth estimation methods. In contrast, we propose several lightweight zero-shot rescaling strategies to obtain metric depth from relative depth estimates via the sparse 3D feature map created using a visual-inertial navigation system. These strategies are compared for their accuracy in diverse simulation environments. The best performing approach, which leverages monotonic spline fitting, is deployed in the real-world on a compute-constrained quadrotor. We obtain on-board metric depth estimates at 15 Hz and demonstrate successful collision avoidance after integrating the proposed method with a motion primitives-based planner.
Not All Correct Answers Are Equal: Why Your Distillation Source Matters
May 20, 2025Distillation has emerged as a practical and effective approach to enhance the reasoning capabilities of open-source language models. In this work, we conduct a large-scale empirical study on reasoning data distillation by collecting verified outputs from three state-of-the-art teacher models-AM-Thinking-v1, Qwen3-235B-A22B, and DeepSeek-R1-on a shared corpus of 1.89 million queries. We construct three parallel datasets and analyze their distributions, revealing that AM-Thinking-v1-distilled data exhibits greater token length diversity and lower perplexity. Student models trained on each dataset are evaluated on reasoning benchmarks including AIME2024, AIME2025, MATH500, and LiveCodeBench. The AM-based model consistently achieves the best performance (e.g., 84.3 on AIME2024, 72.2 on AIME2025, 98.4 on MATH500, and 65.9 on LiveCodeBench) and demonstrates adaptive output behavior-producing longer responses for harder tasks and shorter ones for simpler tasks. These findings highlight the value of high-quality, verified reasoning traces. We release the AM-Thinking-v1 and Qwen3-235B-A22B distilled datasets to support future research on open and high-performing reasoning-oriented language models. The datasets are publicly available on Hugging Face\footnote{Datasets are available on Hugging Face: \href{https://huggingface.co/datasets/a-m-team/AM-Thinking-v1-Distilled}{AM-Thinking-v1-Distilled}, \href{https://huggingface.co/datasets/a-m-team/AM-Qwen3-Distilled}{AM-Qwen3-Distilled}.}.
AM-Thinking-v1: Advancing the Frontier of Reasoning at 32B Scale
May 13, 2025We present AM-Thinking-v1, a 32B dense language model that advances the frontier of reasoning, embodying the collaborative spirit of open-source innovation. Outperforming DeepSeek-R1 and rivaling leading Mixture-of-Experts (MoE) models like Qwen3-235B-A22B and Seed1.5-Thinking, AM-Thinking-v1 achieves impressive scores of 85.3 on AIME 2024, 74.4 on AIME 2025, and 70.3 on LiveCodeBench, showcasing state-of-the-art mathematical and coding capabilities among open-source models of similar scale. Built entirely from the open-source Qwen2.5-32B base model and publicly available queries, AM-Thinking-v1 leverages a meticulously crafted post-training pipeline - combining supervised fine-tuning and reinforcement learning - to deliver exceptional reasoning capabilities. This work demonstrates that the open-source community can achieve high performance at the 32B scale, a practical sweet spot for deployment and fine-tuning. By striking a balance between top-tier performance and real-world usability, we hope AM-Thinking-v1 inspires further collaborative efforts to harness mid-scale models, pushing reasoning boundaries while keeping accessibility at the core of innovation. We have open-sourced our model on \href{https://huggingface.co/a-m-team/AM-Thinking-v1}{Hugging Face}.
Exploring the Potential of Offline RL for Reasoning in LLMs: A Preliminary Study
May 04, 2025Despite significant advances in long-context reasoning by large language models (LLMs), primarily through Online Reinforcement Learning (RL) methods, these approaches incur substantial computational costs and complexity. In contrast, simpler and more economical Offline RL methods remain underexplored. To address this gap, we investigate the effectiveness of Offline RL methods, specifically Direct Preference Optimization (DPO) and its length-desensitized variant LD-DPO, in enhancing the reasoning capabilities of LLMs. Extensive experiments across multiple reasoning benchmarks demonstrate that these simpler Offline RL methods substantially improve model performance, achieving an average enhancement of 3.3\%, with a particularly notable increase of 10.1\% on the challenging Arena-Hard benchmark. Furthermore, we analyze DPO's sensitivity to output length, emphasizing that increasing reasoning length should align with semantic richness, as indiscriminate lengthening may adversely affect model performance. We provide comprehensive descriptions of our data processing and training methodologies, offering empirical evidence and practical insights for developing more cost-effective Offline RL approaches.
DeepDistill: Enhancing LLM Reasoning Capabilities via Large-Scale Difficulty-Graded Data Training
Apr 24, 2025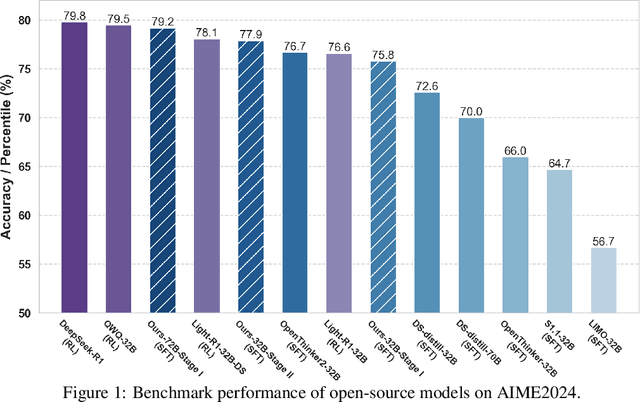



Although large language models (LLMs) have recently achieved remarkable performance on various complex reasoning benchmarks, the academic community still lacks an in-depth understanding of base model training processes and data quality. To address this, we construct a large-scale, difficulty-graded reasoning dataset containing approximately 3.34 million unique queries of varying difficulty levels and about 40 million distilled responses generated by multiple models over several passes. Leveraging pass rate and Coefficient of Variation (CV), we precisely select the most valuable training data to enhance reasoning capability. Notably, we observe a training pattern shift, indicating that reasoning-focused training based on base models requires higher learning rates for effective training. Using this carefully selected data, we significantly improve the reasoning capabilities of the base model, achieving a pass rate of 79.2\% on the AIME2024 mathematical reasoning benchmark. This result surpasses most current distilled models and closely approaches state-of-the-art performance. We provide detailed descriptions of our data processing, difficulty assessment, and training methodology, and have publicly released all datasets and methods to promote rapid progress in open-source long-reasoning LLMs. The dataset is available at: https://huggingface.co/datasets/a-m-team/AM-DeepSeek-Distilled-40M
Leveraging Reasoning Model Answers to Enhance Non-Reasoning Model Capability
Apr 13, 2025
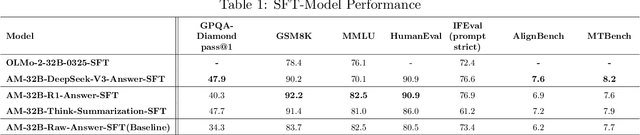

Recent advancements in large language models (LLMs), such as DeepSeek-R1 and OpenAI-o1, have demonstrated the significant effectiveness of test-time scaling, achieving substantial performance gains across various benchmarks. These advanced models utilize deliberate "thinking" steps to systematically enhance answer quality. In this paper, we propose leveraging these high-quality outputs generated by reasoning-intensive models to improve less computationally demanding, non-reasoning models. We explore and compare methodologies for utilizing the answers produced by reasoning models to train and improve non-reasoning models. Through straightforward Supervised Fine-Tuning (SFT) experiments on established benchmarks, we demonstrate consistent improvements across various benchmarks, underscoring the potential of this approach for advancing the ability of models to answer questions directly.
How Difficulty-Aware Staged Reinforcement Learning Enhances LLMs' Reasoning Capabilities: A Preliminary Experimental Study
Apr 01, 2025



Enhancing the reasoning capabilities of Large Language Models (LLMs) with efficiency and scalability remains a fundamental challenge in artificial intelligence research. This paper presents a rigorous experimental investigation into how difficulty-aware staged reinforcement learning (RL) strategies can substantially improve LLM reasoning performance. Through systematic analysis, we demonstrate that strategically selecting training data according to well-defined difficulty levels markedly enhances RL optimization. Moreover, we introduce a staged training methodology, progressively exposing models to increasingly challenging tasks, further amplifying reasoning capabilities. Our findings reveal significant cross-domain benefits when simultaneously training models on mathematical reasoning and code generation tasks. Notably, our proposed approach enables a 1.5B parameter model to achieve an accuracy of 42.3\% on the AIME-2024 benchmark, 89.5\% on the MATH-500 benchmark. These results underscore the efficacy of our method in advancing the reasoning proficiency of LLMs. We will open-source our datasets on GitHub and Hugging Face.