 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBrainStack: Neuro-MoE with Functionally Guided Expert Routing for EEG-Based Language Decoding
Jan 29, 2026Decoding linguistic information from electroencephalography (EEG) remains challenging due to the brain's distributed and nonlinear organization. We present BrainStack, a functionally guided neuro-mixture-of-experts (Neuro-MoE) framework that models the brain's modular functional architecture through anatomically partitioned expert networks. Each functional region is represented by a specialized expert that learns localized neural dynamics, while a transformer-based global expert captures cross-regional dependencies. A learnable routing gate adaptively aggregates these heterogeneous experts, enabling context-dependent expert coordination and selective fusion. To promote coherent representation across the hierarchy, we introduce cross-regional distillation, where the global expert provides top-down regularization to the regional experts. We further release SilentSpeech-EEG (SS-EEG), a large-scale benchmark comprising over 120 hours of EEG recordings from 12 subjects performing 24 silent words, the largest dataset of its kind. Experiments demonstrate that BrainStack consistently outperforms state-of-the-art models, achieving superior accuracy and generalization across subjects. Our results establish BrainStack as a functionally modular, neuro-inspired MoE paradigm that unifies neuroscientific priors with adaptive expert routing, paving the way for scalable and interpretable brain-language decoding.
Astra: Toward General-Purpose Mobile Robots via Hierarchical Multimodal Learning
Jun 06, 2025Modern robot navigation systems encounter difficulties in diverse and complex indoor environments. Traditional approaches rely on multiple modules with small models or rule-based systems and thus lack adaptability to new environments. To address this, we developed Astra, a comprehensive dual-model architecture, Astra-Global and Astra-Local, for mobile robot navigation. Astra-Global, a multimodal LLM, processes vision and language inputs to perform self and goal localization using a hybrid topological-semantic graph as the global map, and outperforms traditional visual place recognition methods. Astra-Local, a multitask network, handles local path planning and odometry estimation. Its 4D spatial-temporal encoder, trained through self-supervised learning, generates robust 4D features for downstream tasks. The planning head utilizes flow matching and a novel masked ESDF loss to minimize collision risks for generating local trajectories, and the odometry head integrates multi-sensor inputs via a transformer encoder to predict the relative pose of the robot. Deployed on real in-house mobile robots, Astra achieves high end-to-end mission success rate across diverse indoor environments.
Pretraining Large Brain Language Model for Active BCI: Silent Speech
Apr 29, 2025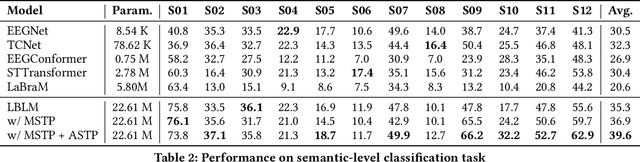
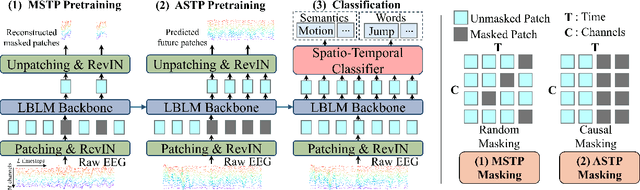
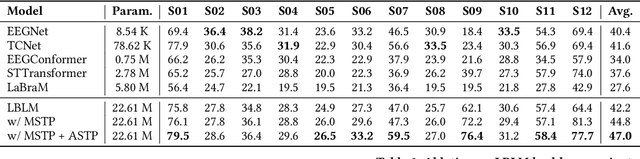
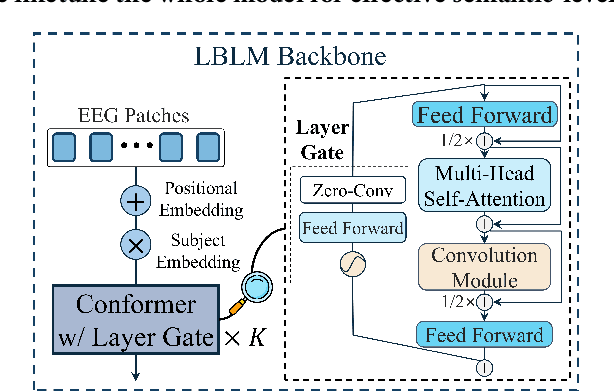
This paper explores silent speech decoding in active brain-computer interface (BCI) systems, which offer more natural and flexible communication than traditional BCI applications. We collected a new silent speech dataset of over 120 hours of electroencephalogram (EEG) recordings from 12 subjects, capturing 24 commonly used English words for language model pretraining and decoding. Following the recent success of pretraining large models with self-supervised paradigms to enhance EEG classification performance, we propose Large Brain Language Model (LBLM) pretrained to decode silent speech for active BCI. To pretrain LBLM, we propose Future Spectro-Temporal Prediction (FSTP) pretraining paradigm to learn effective representations from unlabeled EEG data. Unlike existing EEG pretraining methods that mainly follow a masked-reconstruction paradigm, our proposed FSTP method employs autoregressive modeling in temporal and frequency domains to capture both temporal and spectral dependencies from EEG signals. After pretraining, we finetune our LBLM on downstream tasks, including word-level and semantic-level classification. Extensive experiments demonstrate significant performance gains of the LBLM over fully-supervised and pretrained baseline models. For instance, in the difficult cross-session setting, our model achieves 47.0\% accuracy on semantic-level classification and 39.6\% in word-level classification, outperforming baseline methods by 5.4\% and 7.3\%, respectively. Our research advances silent speech decoding in active BCI systems, offering an innovative solution for EEG language model pretraining and a new dataset for fundamental research.
Neural Spelling: A Spell-Based BCI System for Language Neural Decoding
Jan 29, 2025



Brain-computer interfaces (BCIs) present a promising avenue by translating neural activity directly into text, eliminating the need for physical actions. However, existing non-invasive BCI systems have not successfully covered the entire alphabet, limiting their practicality. In this paper, we propose a novel non-invasive EEG-based BCI system with Curriculum-based Neural Spelling Framework, which recognizes all 26 alphabet letters by decoding neural signals associated with handwriting first, and then apply a Generative AI (GenAI) to enhance spell-based neural language decoding tasks. Our approach combines the ease of handwriting with the accessibility of EEG technology, utilizing advanced neural decoding algorithms and pre-trained large language models (LLMs) to translate EEG patterns into text with high accuracy. This system show how GenAI can improve the performance of typical spelling-based neural language decoding task, and addresses the limitations of previous methods, offering a scalable and user-friendly solution for individuals with communication impairments, thereby enhancing inclusive communication options.
Contrastive Masked Autoencoders for Character-Level Open-Set Writer Identification
Jan 21, 2025



In the realm of digital forensics and document authentication, writer identification plays a crucial role in determining the authors of documents based on handwriting styles. The primary challenge in writer-id is the "open-set scenario", where the goal is accurately recognizing writers unseen during the model training. To overcome this challenge, representation learning is the key. This method can capture unique handwriting features, enabling it to recognize styles not previously encountered during training. Building on this concept, this paper introduces the Contrastive Masked Auto-Encoders (CMAE) for Character-level Open-Set Writer Identification. We merge Masked Auto-Encoders (MAE) with Contrastive Learning (CL) to simultaneously and respectively capture sequential information and distinguish diverse handwriting styles. Demonstrating its effectiveness, our model achieves state-of-the-art (SOTA) results on the CASIA online handwriting dataset, reaching an impressive precision rate of 89.7%. Our study advances universal writer-id with a sophisticated representation learning approach, contributing substantially to the ever-evolving landscape of digital handwriting analysis, and catering to the demands of an increasingly interconnected world.
iFuzzyTL: Interpretable Fuzzy Transfer Learning for SSVEP BCI System
Oct 16, 2024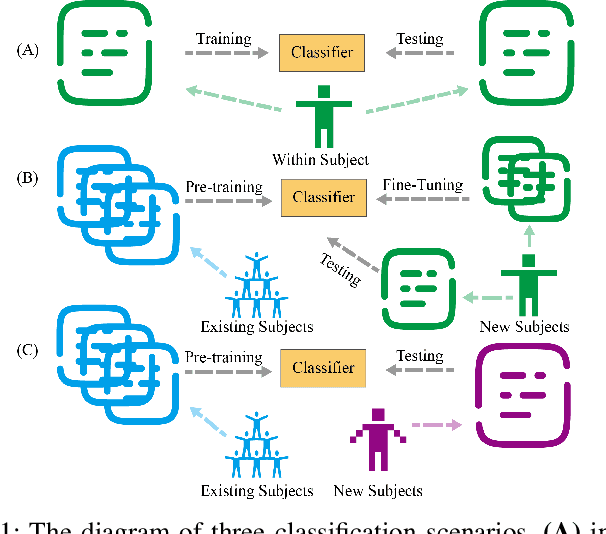
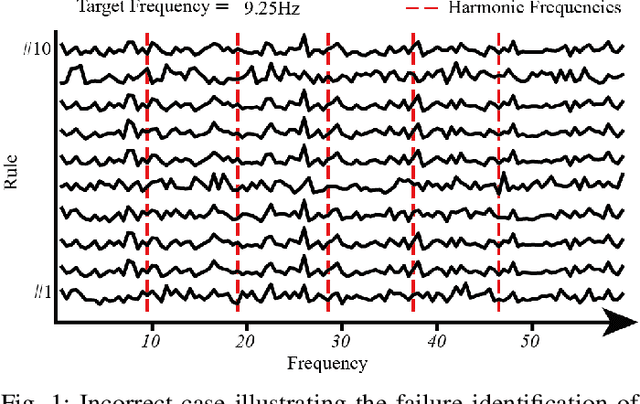
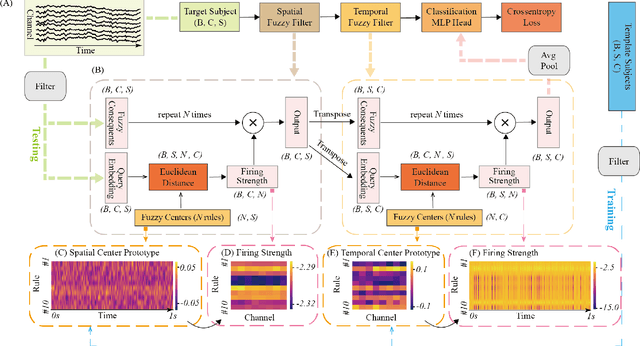
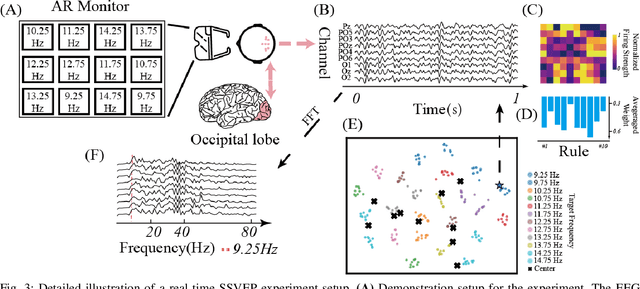
The rapid evolution of Brain-Computer Interfaces (BCIs) has significantly influenced the domain of human-computer interaction, with Steady-State Visual Evoked Potentials (SSVEP) emerging as a notably robust paradigm. This study explores advanced classification techniques leveraging interpretable fuzzy transfer learning (iFuzzyTL) to enhance the adaptability and performance of SSVEP-based systems. Recent efforts have strengthened to reduce calibration requirements through innovative transfer learning approaches, which refine cross-subject generalizability and minimize calibration through strategic application of domain adaptation and few-shot learning strategies. Pioneering developments in deep learning also offer promising enhancements, facilitating robust domain adaptation and significantly improving system responsiveness and accuracy in SSVEP classification. However, these methods often require complex tuning and extensive data, limiting immediate applicability. iFuzzyTL introduces an adaptive framework that combines fuzzy logic principles with neural network architectures, focusing on efficient knowledge transfer and domain adaptation. iFuzzyTL refines input signal processing and classification in a human-interpretable format by integrating fuzzy inference systems and attention mechanisms. This approach bolsters the model's precision and aligns with real-world operational demands by effectively managing the inherent variability and uncertainty of EEG data. The model's efficacy is demonstrated across three datasets: 12JFPM (89.70% accuracy for 1s with an information transfer rate (ITR) of 149.58), Benchmark (85.81% accuracy for 1s with an ITR of 213.99), and eldBETA (76.50% accuracy for 1s with an ITR of 94.63), achieving state-of-the-art results and setting new benchmarks for SSVEP BCI performance.
E2H: A Two-Stage Non-Invasive Neural Signal Driven Humanoid Robotic Whole-Body Control Framework
Oct 03, 2024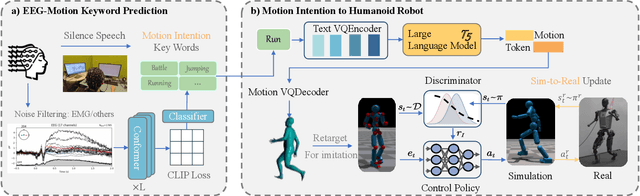
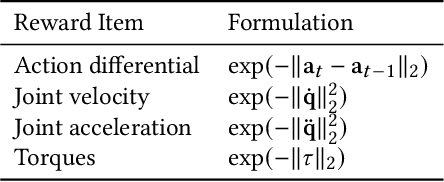
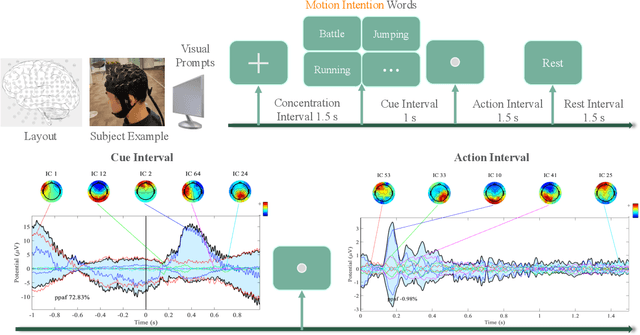
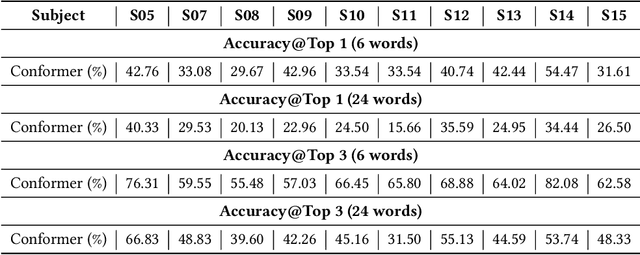
Recent advancements in humanoid robotics, including the integration of hierarchical reinforcement learning-based control and the utilization of LLM planning, have significantly enhanced the ability of robots to perform complex tasks. In contrast to the highly developed humanoid robots, the human factors involved remain relatively unexplored. Directly controlling humanoid robots with the brain has already appeared in many science fiction novels, such as Pacific Rim and Gundam. In this work, we present E2H (EEG-to-Humanoid), an innovative framework that pioneers the control of humanoid robots using high-frequency non-invasive neural signals. As the none-invasive signal quality remains low in decoding precise spatial trajectory, we decompose the E2H framework in an innovative two-stage formation: 1) decoding neural signals (EEG) into semantic motion keywords, 2) utilizing LLM facilitated motion generation with a precise motion imitation control policy to realize humanoid robotics control. The method of directly driving robots with brainwave commands offers a novel approach to human-machine collaboration, especially in situations where verbal commands are impractical, such as in cases of speech impairments, space exploration, or underwater exploration, unlocking significant potential. E2H offers an exciting glimpse into the future, holding immense potential for human-computer interaction.
A Fuzzy-based Approach to Predict Human Interaction by Functional Near-Infrared Spectroscopy
Sep 26, 2024



The paper introduces a Fuzzy-based Attention (Fuzzy Attention Layer) mechanism, a novel computational approach to enhance the interpretability and efficacy of neural models in psychological research. The proposed Fuzzy Attention Layer mechanism is integrated as a neural network layer within the Transformer Encoder model to facilitate the analysis of complex psychological phenomena through neural signals, such as those captured by functional Near-Infrared Spectroscopy (fNIRS). By leveraging fuzzy logic, the Fuzzy Attention Layer is capable of learning and identifying interpretable patterns of neural activity. This capability addresses a significant challenge when using Transformer: the lack of transparency in determining which specific brain activities most contribute to particular predictions. Our experimental results demonstrated on fNIRS data from subjects engaged in social interactions involving handholding reveal that the Fuzzy Attention Layer not only learns interpretable patterns of neural activity but also enhances model performance. Additionally, the learned patterns provide deeper insights into the neural correlates of interpersonal touch and emotional exchange. The application of our model shows promising potential in deciphering the subtle complexities of human social behaviors, thereby contributing significantly to the fields of social neuroscience and psychological AI.
FlashP: An Analytical Pipeline for Real-time Forecasting of Time-Series Relational Data
Jan 16, 2021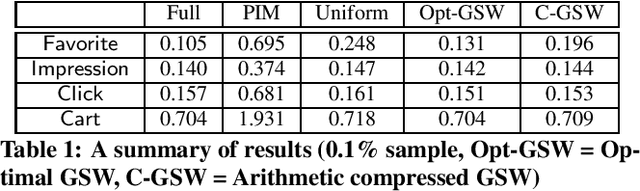
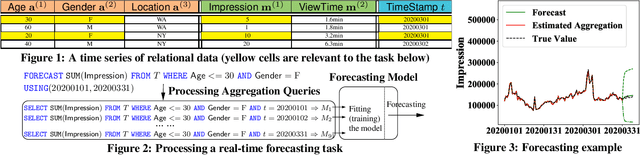

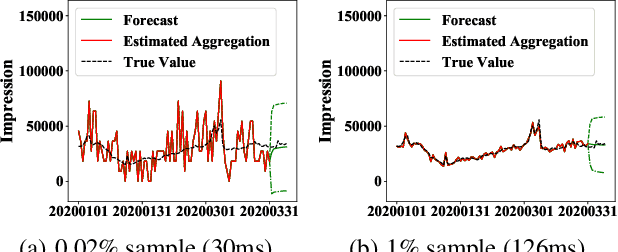
Interactive response time is important in analytical pipelines for users to explore a sufficient number of possibilities and make informed business decisions. We consider a forecasting pipeline with large volumes of high-dimensional time series data. Real-time forecasting can be conducted in two steps. First, we specify the part of data to be focused on and the measure to be predicted by slicing, dicing, and aggregating the data. Second, a forecasting model is trained on the aggregated results to predict the trend of the specified measure. While there are a number of forecasting models available, the first step is the performance bottleneck. A natural idea is to utilize sampling to obtain approximate aggregations in real time as the input to train the forecasting model. Our scalable real-time forecasting system FlashP (Flash Prediction) is built based on this idea, with two major challenges to be resolved in this paper: first, we need to figure out how approximate aggregations affect the fitting of forecasting models, and forecasting results; and second, accordingly, what sampling algorithms we should use to obtain these approximate aggregations and how large the samples are. We introduce a new sampling scheme, called GSW sampling, and analyze error bounds for estimating aggregations using GSW samples. We introduce how to construct compact GSW samples with the existence of multiple measures to be analyzed. We conduct experiments to evaluate our solution and compare it with alternatives on real data.