 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeE2H: A Two-Stage Non-Invasive Neural Signal Driven Humanoid Robotic Whole-Body Control Framework
Paper and Code
Oct 03, 2024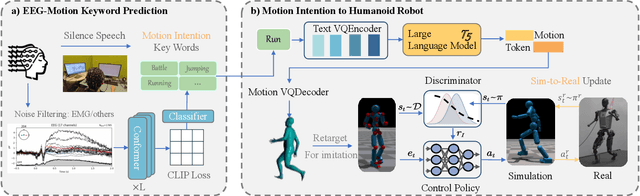
Recent advancements in humanoid robotics, including the integration of hierarchical reinforcement learning-based control and the utilization of LLM planning, have significantly enhanced the ability of robots to perform complex tasks. In contrast to the highly developed humanoid robots, the human factors involved remain relatively unexplored. Directly controlling humanoid robots with the brain has already appeared in many science fiction novels, such as Pacific Rim and Gundam. In this work, we present E2H (EEG-to-Humanoid), an innovative framework that pioneers the control of humanoid robots using high-frequency non-invasive neural signals. As the none-invasive signal quality remains low in decoding precise spatial trajectory, we decompose the E2H framework in an innovative two-stage formation: 1) decoding neural signals (EEG) into semantic motion keywords, 2) utilizing LLM facilitated motion generation with a precise motion imitation control policy to realize humanoid robotics control. The method of directly driving robots with brainwave commands offers a novel approach to human-machine collaboration, especially in situations where verbal commands are impractical, such as in cases of speech impairments, space exploration, or underwater exploration, unlocking significant potential. E2H offers an exciting glimpse into the future, holding immense potential for human-computer interaction.