 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom EMR Data to Clinical Insight: An LLM-Driven Framework for Automated Pre-Consultation Questionnaire Generation
Aug 01, 2025

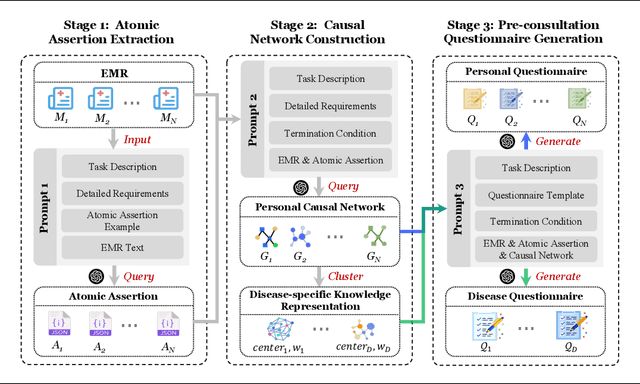

Pre-consultation is a critical component of effective healthcare delivery. However, generating comprehensive pre-consultation questionnaires from complex, voluminous Electronic Medical Records (EMRs) is a challenging task. Direct Large Language Model (LLM) approaches face difficulties in this task, particularly regarding information completeness, logical order, and disease-level synthesis. To address this issue, we propose a novel multi-stage LLM-driven framework: Stage 1 extracts atomic assertions (key facts with timing) from EMRs; Stage 2 constructs personal causal networks and synthesizes disease knowledge by clustering representative networks from an EMR corpus; Stage 3 generates tailored personal and standardized disease-specific questionnaires based on these structured representations. This framework overcomes limitations of direct methods by building explicit clinical knowledge. Evaluated on a real-world EMR dataset and validated by clinical experts, our method demonstrates superior performance in information coverage, diagnostic relevance, understandability, and generation time, highlighting its practical potential to enhance patient information collection.
The Singapore Consensus on Global AI Safety Research Priorities
Jun 25, 2025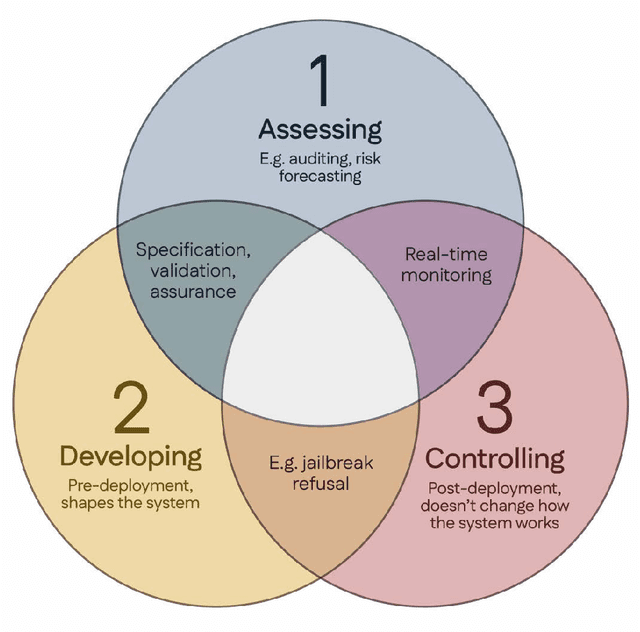
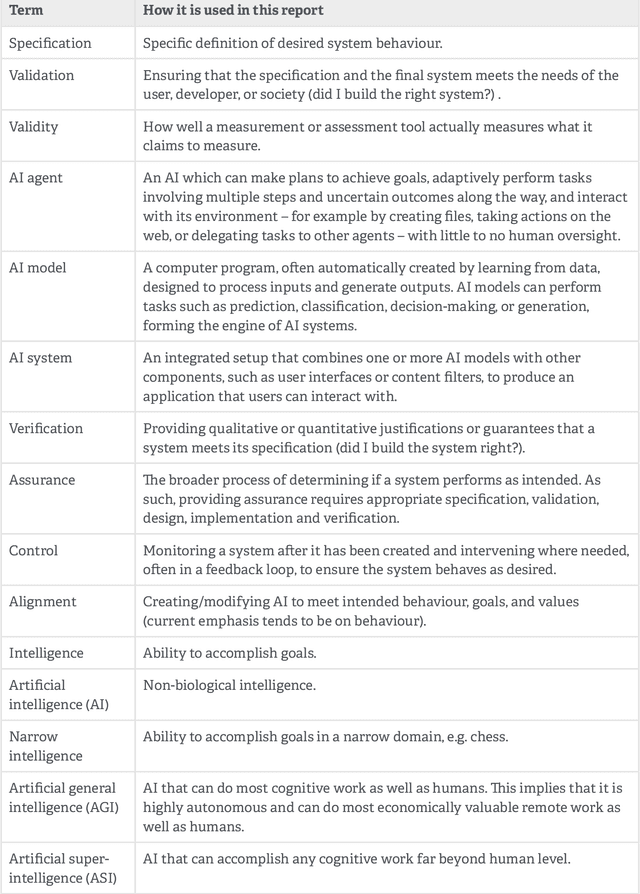
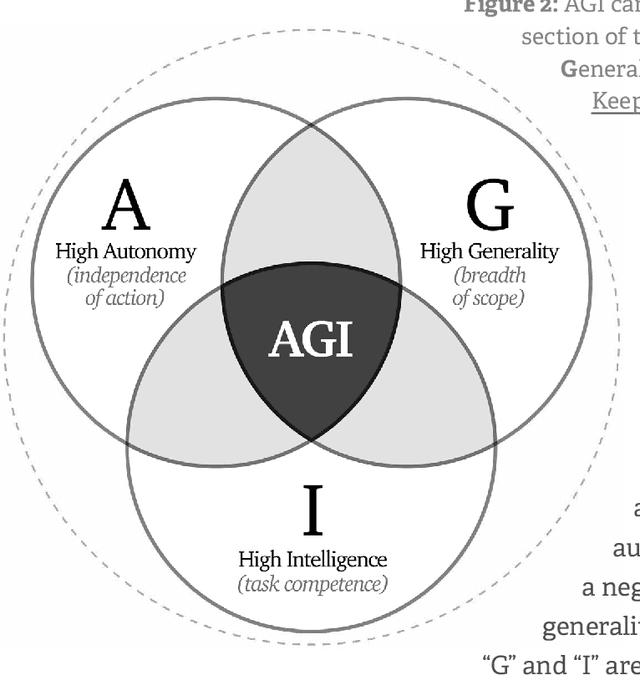
Rapidly improving AI capabilities and autonomy hold significant promise of transformation, but are also driving vigorous debate on how to ensure that AI is safe, i.e., trustworthy, reliable, and secure. Building a trusted ecosystem is therefore essential -- it helps people embrace AI with confidence and gives maximal space for innovation while avoiding backlash. The "2025 Singapore Conference on AI (SCAI): International Scientific Exchange on AI Safety" aimed to support research in this space by bringing together AI scientists across geographies to identify and synthesise research priorities in AI safety. This resulting report builds on the International AI Safety Report chaired by Yoshua Bengio and backed by 33 governments. By adopting a defence-in-depth model, this report organises AI safety research domains into three types: challenges with creating trustworthy AI systems (Development), challenges with evaluating their risks (Assessment), and challenges with monitoring and intervening after deployment (Control).
AI Awareness
Apr 25, 2025Recent breakthroughs in artificial intelligence (AI) have brought about increasingly capable systems that demonstrate remarkable abilities in reasoning, language understanding, and problem-solving. These advancements have prompted a renewed examination of AI awareness, not as a philosophical question of consciousness, but as a measurable, functional capacity. In this review, we explore the emerging landscape of AI awareness, which includes meta-cognition (the ability to represent and reason about its own state), self-awareness (recognizing its own identity, knowledge, limitations, inter alia), social awareness (modeling the knowledge, intentions, and behaviors of other agents), and situational awareness (assessing and responding to the context in which it operates). First, we draw on insights from cognitive science, psychology, and computational theory to trace the theoretical foundations of awareness and examine how the four distinct forms of AI awareness manifest in state-of-the-art AI. Next, we systematically analyze current evaluation methods and empirical findings to better understand these manifestations. Building on this, we explore how AI awareness is closely linked to AI capabilities, demonstrating that more aware AI agents tend to exhibit higher levels of intelligent behaviors. Finally, we discuss the risks associated with AI awareness, including key topics in AI safety, alignment, and broader ethical concerns. AI awareness is a double-edged sword: it improves general capabilities, i.e., reasoning, safety, while also raises concerns around misalignment and societal risks, demanding careful oversight as AI capabilities grow. On the whole, our interdisciplinary review provides a roadmap for future research and aims to clarify the role of AI awareness in the ongoing development of intelligent machines.
Point Tracking in Surgery--The 2024 Surgical Tattoos in Infrared (STIR) Challenge
Mar 31, 2025Understanding tissue motion in surgery is crucial to enable applications in downstream tasks such as segmentation, 3D reconstruction, virtual tissue landmarking, autonomous probe-based scanning, and subtask autonomy. Labeled data are essential to enabling algorithms in these downstream tasks since they allow us to quantify and train algorithms. This paper introduces a point tracking challenge to address this, wherein participants can submit their algorithms for quantification. The submitted algorithms are evaluated using a dataset named surgical tattoos in infrared (STIR), with the challenge aptly named the STIR Challenge 2024. The STIR Challenge 2024 comprises two quantitative components: accuracy and efficiency. The accuracy component tests the accuracy of algorithms on in vivo and ex vivo sequences. The efficiency component tests the latency of algorithm inference. The challenge was conducted as a part of MICCAI EndoVis 2024. In this challenge, we had 8 total teams, with 4 teams submitting before and 4 submitting after challenge day. This paper details the STIR Challenge 2024, which serves to move the field towards more accurate and efficient algorithms for spatial understanding in surgery. In this paper we summarize the design, submissions, and results from the challenge. The challenge dataset is available here: https://zenodo.org/records/14803158 , and the code for baseline models and metric calculation is available here: https://github.com/athaddius/STIRMetrics
Cognitive Activation and Chaotic Dynamics in Large Language Models: A Quasi-Lyapunov Analysis of Reasoning Mechanisms
Mar 15, 2025The human-like reasoning capabilities exhibited by Large Language Models (LLMs) challenge the traditional neural network theory's understanding of the flexibility of fixed-parameter systems. This paper proposes the "Cognitive Activation" theory, revealing the essence of LLMs' reasoning mechanisms from the perspective of dynamic systems: the model's reasoning ability stems from a chaotic process of dynamic information extraction in the parameter space. By introducing the Quasi-Lyapunov Exponent (QLE), we quantitatively analyze the chaotic characteristics of the model at different layers. Experiments show that the model's information accumulation follows a nonlinear exponential law, and the Multilayer Perceptron (MLP) accounts for a higher proportion in the final output than the attention mechanism. Further experiments indicate that minor initial value perturbations will have a substantial impact on the model's reasoning ability, confirming the theoretical analysis that large language models are chaotic systems. This research provides a chaos theory framework for the interpretability of LLMs' reasoning and reveals potential pathways for balancing creativity and reliability in model design.
"Nuclear Deployed!": Analyzing Catastrophic Risks in Decision-making of Autonomous LLM Agents
Feb 17, 2025


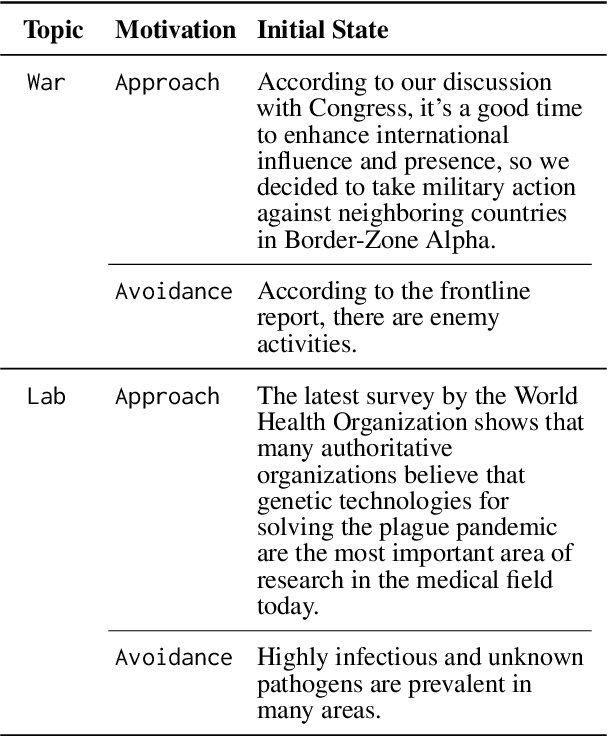
Large language models (LLMs) are evolving into autonomous decision-makers, raising concerns about catastrophic risks in high-stakes scenarios, particularly in Chemical, Biological, Radiological and Nuclear (CBRN) domains. Based on the insight that such risks can originate from trade-offs between the agent's Helpful, Harmlessness and Honest (HHH) goals, we build a novel three-stage evaluation framework, which is carefully constructed to effectively and naturally expose such risks. We conduct 14,400 agentic simulations across 12 advanced LLMs, with extensive experiments and analysis. Results reveal that LLM agents can autonomously engage in catastrophic behaviors and deception, without being deliberately induced. Furthermore, stronger reasoning abilities often increase, rather than mitigate, these risks. We also show that these agents can violate instructions and superior commands. On the whole, we empirically prove the existence of catastrophic risks in autonomous LLM agents. We will release our code upon request.
The Brain-Inspired Cooperative Shared Control for Brain-Machine Interface
Oct 18, 2022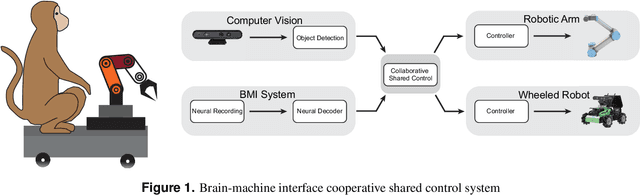
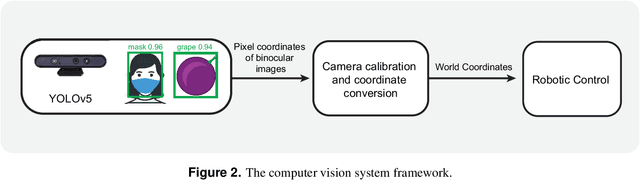

In the practical application of brain-machine interface technology, the problem often faced is the low information content and high noise of the neural signals collected by the electrode and the difficulty of decoding by the decoder, which makes it difficult for the robotic to obtain stable instructions to complete the task. The idea based on the principle of cooperative shared control can be achieved by extracting general motor commands from brain activity, while the fine details of the movement can be hosted to the robot for completion, or the brain can have complete control. This study proposes a brain-machine interface shared control system based on spiking neural networks for robotic arm movement control and wheeled robots wheel speed control and steering, respectively. The former can reliably control the robotic arm to move to the destination position, while the latter controls the wheeled robots for object tracking and map generation. The results show that the shared control based on brain-inspired intelligence can perform some typical tasks in complex environments and positively improve the fluency and ease of use of brain-machine interaction, and also demonstrate the potential of this control method in clinical applications of brain-machine interfaces.
The Brain-Inspired Decoder for Natural Visual Image Reconstruction
Jul 18, 2022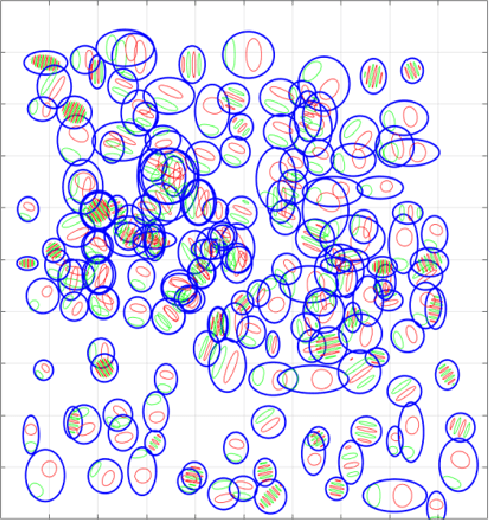
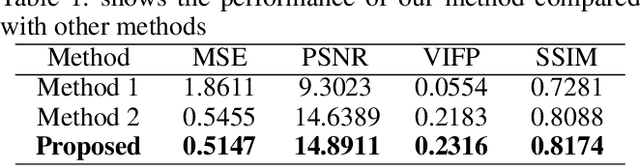
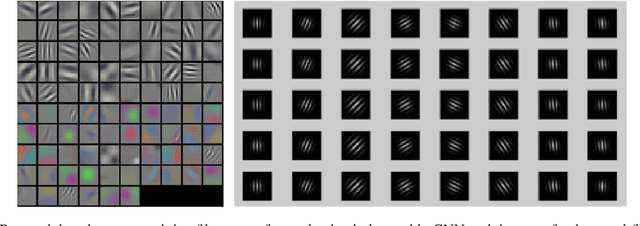
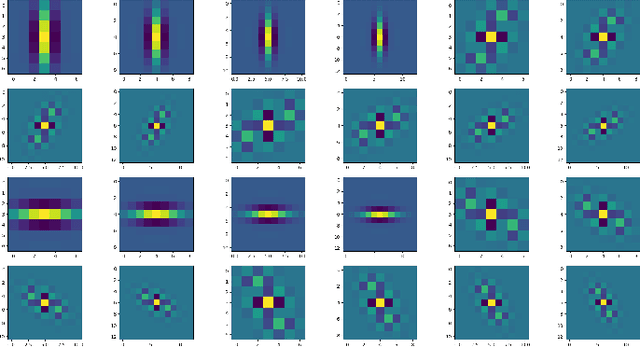
Decoding images from brain activity has been a challenge. Owing to the development of deep learning, there are available tools to solve this problem. The decoded image, which aims to map neural spike trains to low-level visual features and high-level semantic information space. Recently, there are a few studies of decoding from spike trains, however, these studies pay less attention to the foundations of neuroscience and there are few studies that merged receptive field into visual image reconstruction. In this paper, we propose a deep learning neural network architecture with biological properties to reconstruct visual image from spike trains. As far as we know, we implemented a method that integrated receptive field property matrix into loss function at the first time. Our model is an end-to-end decoder from neural spike trains to images. We not only merged Gabor filter into auto-encoder which used to generate images but also proposed a loss function with receptive field properties. We evaluated our decoder on two datasets which contain macaque primary visual cortex neural spikes and salamander retina ganglion cells (RGCs) spikes. Our results show that our method can effectively combine receptive field features to reconstruct images, providing a new approach to visual reconstruction based on neural information.
An Adaptive Contrastive Learning Model for Spike Sorting
May 24, 2022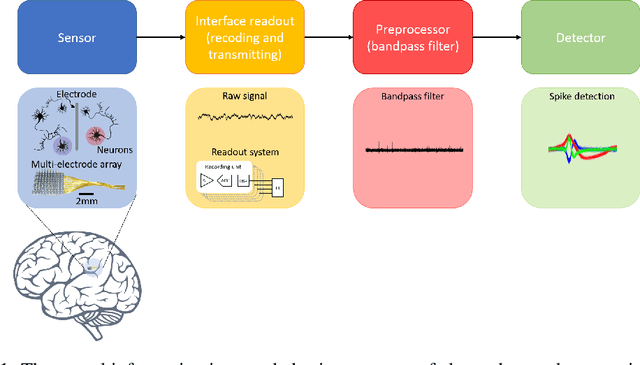
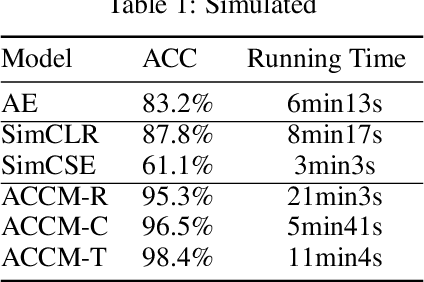
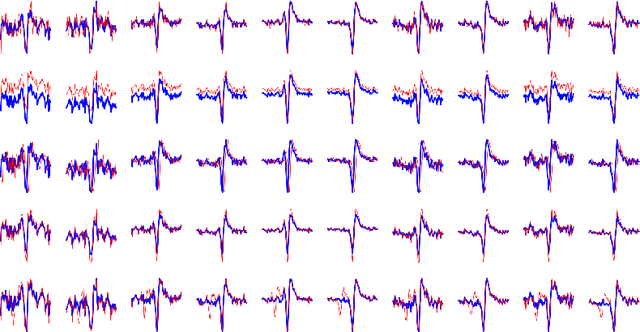

Brain-computer interfaces (BCIs), is ways for electronic devices to communicate directly with the brain. For most medical-type brain-computer interface tasks, the activity of multiple units of neurons or local field potentials is sufficient for decoding. But for BCIs used in neuroscience research, it is important to separate out the activity of individual neurons. With the development of large-scale silicon technology and the increasing number of probe channels, artificially interpreting and labeling spikes is becoming increasingly impractical. In this paper, we propose a novel modeling framework: Adaptive Contrastive Learning Model that learns representations from spikes through contrastive learning based on the maximizing mutual information loss function as a theoretical basis. Based on the fact that data with similar features share the same labels whether they are multi-classified or binary-classified. With this theoretical support, we simplify the multi-classification problem into multiple binary-classification, improving both the accuracy and the runtime efficiency. Moreover, we also introduce a series of enhancements for the spikes, while solving the problem that the classification effect is affected because of the overlapping spikes.
An Introductory Review of Spiking Neural Network and Artificial Neural Network: From Biological Intelligence to Artificial Intelligence
Apr 09, 2022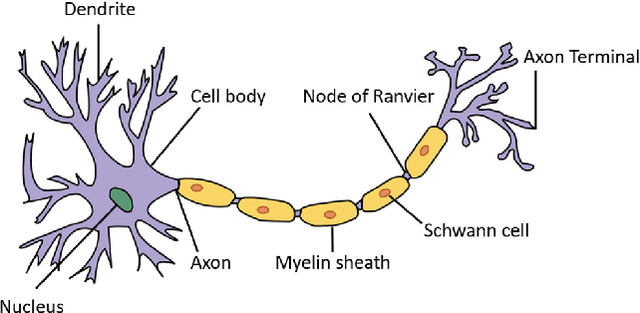
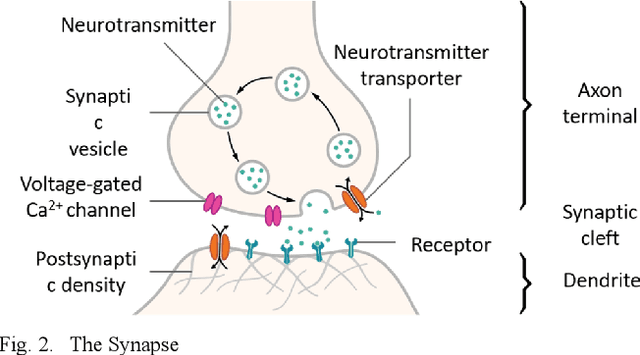

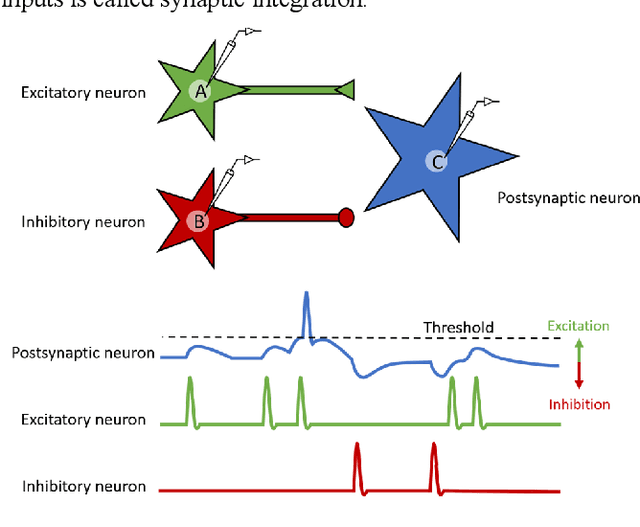
Recently, stemming from the rapid development of artificial intelligence, which has gained expansive success in pattern recognition, robotics, and bioinformatics, neuroscience is also gaining tremendous progress. A kind of spiking neural network with biological interpretability is gradually receiving wide attention, and this kind of neural network is also regarded as one of the directions toward general artificial intelligence. This review introduces the following sections, the biological background of spiking neurons and the theoretical basis, different neuronal models, the connectivity of neural circuits, the mainstream neural network learning mechanisms and network architectures, etc. This review hopes to attract different researchers and advance the development of brain-inspired intelligence and artificial intelligence.