 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement learning in linear embedding space unlocks generalizable control across soft robot configurations
Jun 06, 2026Soft-bodied organisms such as octopuses and elephant trunks exhibit remarkable morphological adaptability, dynamically reconfiguring body shape and stiffness, and flexibly adjusting their control strategies to enable versatile behaviors. Inspired by these biological systems, various soft robots have emerged in recent decades, featuring diverse materials, stiffnesses, and morphologies tailored to specific tasks. Despite substantial advances in the materials and structural designs of soft robots, developing a generalizable control framework capable of rapid adaptation across diverse configurations remains a long-standing challenge. Existing controllers are limited to fixed configurations, demanding laborious configuration-specific remodelling and policy redesign for new configurations. Here, we introduce a generalizable control system that enables rapid adaptation across diverse soft robot configurations via reinforcement learning in a shared linear Koopman embedding space. By encoding robot dynamics into this embedding space, our method decouples control policies from specific morphologies, allowing real-time, model-free policy adaptation across diverse configurations without retraining from scratch. We validate our system across 33 distinct robot configurations. Our system achieves a 75 times reduction in transfer samples across configurations, while sustaining robust performance under high-speed motion, heavy payloads, and multiactuator faults, and achieving real-world skills previously unattainable in soft robotics. This work establishes a unified and adaptable control paradigm for diverse soft robot configurations, bridging mechanical reconfigurability with control flexibility, and may offer broader insights for generalizable control in complex physical systems.
Autonomous Laparoscope Control through Unified Mechanics-Based Representation of Multimodal Intraoperative Information
May 06, 2026Laparoscope-holding robots can provide surgeons with a stable laparoscopic field of view (FOV) and reduce the burden on human assistants. To maintain an ideal intraoperative FOV, the robot must continuously adjust the laparoscope pose according to intraoperative information. However, intraoperative multimodal signals, such as position, force/torque, and images, differ markedly in physical meaning and units, making it difficult to build a unified representation and to generate control commands that can be used directly for laparoscope control. To address this issue, we propose a laparoscope-holding robot control method based on unified mechanics modeling of multimodal information. First, we design mapping strategies for multiple intraoperative sources, including position, force/torque, and images, and unify them into an equivalent-wrench representation in the operational space. Then, using a task-priority scheme, we inject the wrenches into the task space and the null space, respectively, and synthesize laparoscope control commands via task-priority projection, thereby achieving consistent representation and coordinated fusion of multimodal information within a single framework. Finally, taking the intraoperative remote center of motion (RCM) position, force/torque sensor readings, and laparoscopic images as examples, we construct an RCM-constraint wrench to enforce the RCM geometric constraint and reduce the contact force at the trocar site, a laparoscope-manipulation wrench to enable compliant dragging, and an instrument-tracking wrench to achieve autonomous visual tracking of the instruments. Experiments on a surgical phantom and in vivo porcine trials demonstrate that the proposed method supports multi-task operation, including compliant laparoscope manipulation and autonomous instrument tracking, while maintaining the RCM constraint and reducing sustained trocar-site loading.
Cognitive Activation and Chaotic Dynamics in Large Language Models: A Quasi-Lyapunov Analysis of Reasoning Mechanisms
Mar 15, 2025The human-like reasoning capabilities exhibited by Large Language Models (LLMs) challenge the traditional neural network theory's understanding of the flexibility of fixed-parameter systems. This paper proposes the "Cognitive Activation" theory, revealing the essence of LLMs' reasoning mechanisms from the perspective of dynamic systems: the model's reasoning ability stems from a chaotic process of dynamic information extraction in the parameter space. By introducing the Quasi-Lyapunov Exponent (QLE), we quantitatively analyze the chaotic characteristics of the model at different layers. Experiments show that the model's information accumulation follows a nonlinear exponential law, and the Multilayer Perceptron (MLP) accounts for a higher proportion in the final output than the attention mechanism. Further experiments indicate that minor initial value perturbations will have a substantial impact on the model's reasoning ability, confirming the theoretical analysis that large language models are chaotic systems. This research provides a chaos theory framework for the interpretability of LLMs' reasoning and reveals potential pathways for balancing creativity and reliability in model design.
Distilled Visual and Robot Kinematics Embeddings for Metric Depth Estimation in Monocular Scene Reconstruction
Nov 27, 2022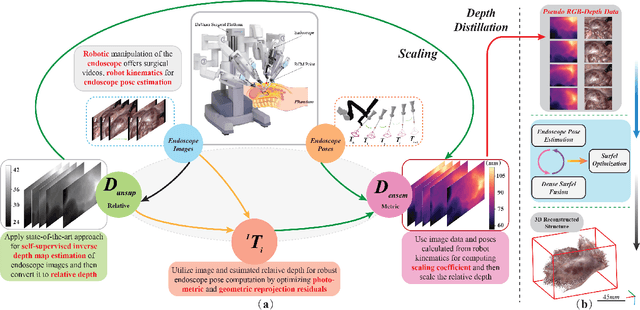
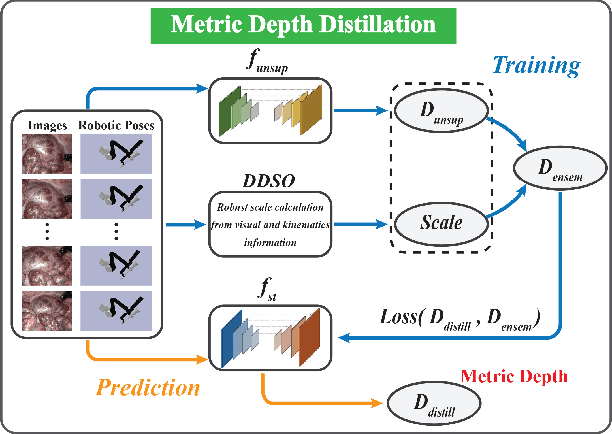
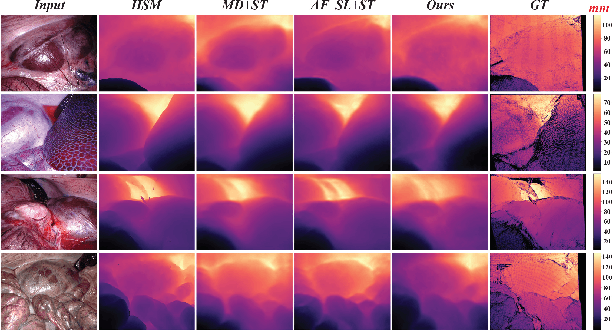

Estimating precise metric depth and scene reconstruction from monocular endoscopy is a fundamental task for surgical navigation in robotic surgery. However, traditional stereo matching adopts binocular images to perceive the depth information, which is difficult to transfer to the soft robotics-based surgical systems due to the use of monocular endoscopy. In this paper, we present a novel framework that combines robot kinematics and monocular endoscope images with deep unsupervised learning into a single network for metric depth estimation and then achieve 3D reconstruction of complex anatomy. Specifically, we first obtain the relative depth maps of surgical scenes by leveraging a brightness-aware monocular depth estimation method. Then, the corresponding endoscope poses are computed based on non-linear optimization of geometric and photometric reprojection residuals. Afterwards, we develop a Depth-driven Sliding Optimization (DDSO) algorithm to extract the scaling coefficient from kinematics and calculated poses offline. By coupling the metric scale and relative depth data, we form a robust ensemble that represents the metric and consistent depth. Next, we treat the ensemble as supervisory labels to train a metric depth estimation network for surgeries (i.e., MetricDepthS-Net) that distills the embeddings from the robot kinematics, endoscopic videos, and poses. With accurate metric depth estimation, we utilize a dense visual reconstruction method to recover the 3D structure of the whole surgical site. We have extensively evaluated the proposed framework on public SCARED and achieved comparable performance with stereo-based depth estimation methods. Our results demonstrate the feasibility of the proposed approach to recover the metric depth and 3D structure with monocular inputs.
Stereo Dense Scene Reconstruction and Accurate Laparoscope Localization for Learning-Based Navigation in Robot-Assisted Surgery
Oct 08, 2021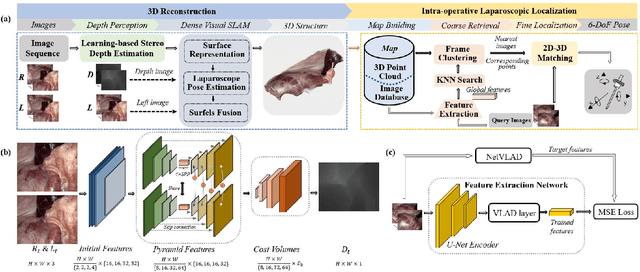
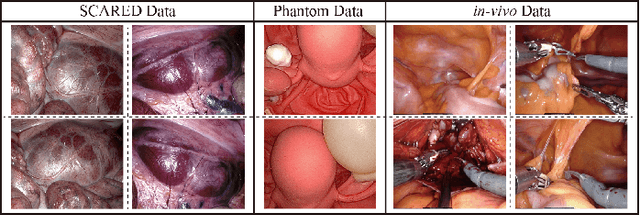
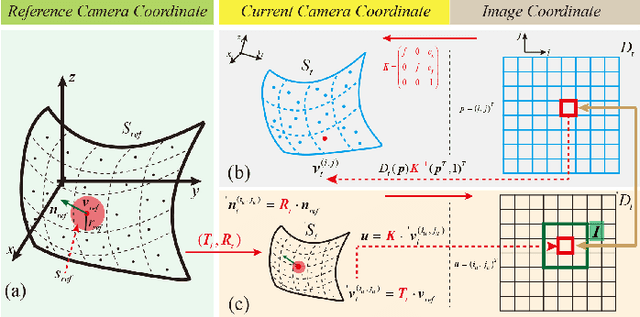
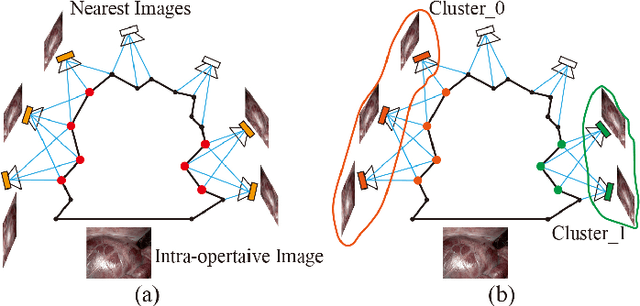
The computation of anatomical information and laparoscope position is a fundamental block of robot-assisted surgical navigation in Minimally Invasive Surgery (MIS). Recovering a dense 3D structure of surgical scene using visual cues remains a challenge, and the online laparoscopic tracking mostly relies on external sensors, which increases system complexity. In this paper, we propose a learning-driven framework, in which an image-guided laparoscopic localization with 3D reconstructions of complex anatomical structures is hereby achieved. To reconstruct the 3D structure of the whole surgical environment, we first fine-tune a learning-based stereoscopic depth perception method, which is robust to the texture-less and variant soft tissues, for depth estimation. Then, we develop a dense visual reconstruction algorithm to represent the scene by surfels, estimate the laparoscope pose and fuse the depth data into a unified reference coordinate for tissue reconstruction. To estimate poses of new laparoscope views, we realize a coarse-to-fine localization method, which incorporates our reconstructed 3D model. We evaluate the reconstruction method and the localization module on three datasets, namely, the stereo correspondence and reconstruction of endoscopic data (SCARED), the ex-vivo phantom and tissue data collected with Universal Robot (UR) and Karl Storz Laparoscope, and the in-vivo DaVinci robotic surgery dataset. Extensive experiments have been conducted to prove the superior performance of our method in 3D anatomy reconstruction and laparoscopic localization, which demonstrates its potential implementation to surgical navigation system.