 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTriLens: Per-Layer Logit-Lens Entropy for White-Box Hallucination Detection
May 31, 2026When a language model hallucinates, the final answer is wrong, but the mistake is not necessarily invisible inside the model. Different internal pathways may remain uncertain, disagree in how quickly they sharpen, or commit to competing continuations before the output is produced. We introduce TriLens, a white-box detector that turns this intuition into a compact representation: at every layer, it reads the multi-head self-attention output, the feed-forward output, and the residual stream through the model's own logit lens, then records only the entropy of each readout. The resulting 3L-dimensional trajectory describes how certainty forms across depth and across modules, without storing high-dimensional hidden states or sampling multiple generations. This simple signal yields a strong detector across instruction-tuned LLMs and QA benchmarks, and our analyses show that the three module-wise entropy trajectories provide complementary evidence. TriLens suggests that hallucination detection can benefit from tracking how internal computation settles, not only what the final layer predicts.
QuadBox: Accelerating 3D Gaussian Splatting with Geometry-Aware Boxes
May 06, 20263D Gaussian Splatting (3DGS) has emerged as an advanced technique for real-time novel view synthesis by representing scene geometry and appearance using differentiable Gaussian primitives. However, efficiently computing precise Gaussian-tile intersections remains a critical task in the rasterization pipeline. To this end, we propose QuadBox, a method that leverages four axis-aligned bounding boxes to tightly encapsulate projected Gaussians in a discrete manner. First, we derive a geometry-aware stretching factor that enables the construction of a tile-aligned QuadBox, which covers the elliptical projection and largely excludes irrelevant tiles. Second, we introduce QPass, a single-pass tile traversal algorithm that exhaustively exploits the discrete nature of QuadBox, ensuring that the tile intersection check is performed with simple interval tests. Experiments on public datasets show that our method accelerates the rendering speed of 3DGS by 1.85$\times$. Code is available at \href{https://github.com/Powertony102/QuadBox}{https://github.com/Powertony102/QuadBox}.
Off-Policy Value-Based Reinforcement Learning for Large Language Models
Mar 24, 2026Improving data utilization efficiency is critical for scaling reinforcement learning (RL) for long-horizon tasks where generating trajectories is expensive. However, the dominant RL methods for LLMs are largely on-policy: they update each batch of data only once, discard it, and then collect fresh samples, resulting in poor sample efficiency. In this work, we explore an alternative value-based RL framework for LLMs that naturally enables off-policy learning. We propose ReVal, a Bellman-update-based method that combines stepwise signals capturing internal consistency with trajectory-level signals derived from outcome verification. ReVal naturally supports replay-buffer-based training, allowing efficient reuse of past trajectories. Experiments on standard mathematical reasoning benchmarks show that ReVal not only converges faster but also outperforms GRPO in final performance. On DeepSeek-R1-Distill-1.5B, ReVal improves training efficiency and achieves improvement of 2.7% in AIME24 and 4.5% in out-of-domain benchmark GPQA over GRPO. These results suggest that value-based RL is a practical alternative to policy-based methods for LLM training.
A Unified Calibration Framework for Coordinate and Kinematic Parameters in Dual-Arm Robots
Mar 16, 2026Precise collaboration in vision-based dual-arm robot systems requires accurate system calibration. Recent dual-robot calibration methods have achieved strong performance by simultaneously solving multiple coordinate transformations. However, these methods either treat kinematic errors as implicit noise or handle them through separated error modeling, resulting in non-negligible accumulated errors. In this paper, we present a novel framework for unified calibration of the coordinate transformations and kinematic parameters in both robot arms. Our key idea is to unify all the tightly coupled parameters within a single Lie-algebraic formulation. To this end, we construct a consolidated error model grounded in the product-of-exponentials formula, which naturally integrates the coordinate and kinematic parameters in twist forms. Our model introduces no artificial error separation and thus greatly mitigates the error propagation. In addition, we derive a closed-form analytical Jacobian from this model using Lie derivatives. By exploring the Jacobian rank property, we analyze the identifiability of all calibration parameters and show that our joint optimization is well-posed under mild conditions. This enables off-the-shelf iterative solvers to stably optimize these parameters on the manifold space. Besides, to ensure robust convergence of our joint optimization, we develop a certifiably correct algorithm for initializing the unknown coordinates. Relying on semidefinite relaxation, our algorithm can yield a reliable estimate whose near-global optimality can be verified a posteriori. Extensive experiments validate the superior accuracy of our approach over previous baselines under identical visual measurements. Meanwhile, our certifiable initialization consistently outperforms several coordinate-only baselines, proving its reliability as a starting point for joint optimization.
A Human-in-the-Loop Confidence-Aware Failure Recovery Framework for Modular Robot Policies
Feb 10, 2026Robots operating in unstructured human environments inevitably encounter failures, especially in robot caregiving scenarios. While humans can often help robots recover, excessive or poorly targeted queries impose unnecessary cognitive and physical workload on the human partner. We present a human-in-the-loop failure-recovery framework for modular robotic policies, where a policy is composed of distinct modules such as perception, planning, and control, any of which may fail and often require different forms of human feedback. Our framework integrates calibrated estimates of module-level uncertainty with models of human intervention cost to decide which module to query and when to query the human. It separates these two decisions: a module selector identifies the module most likely responsible for failure, and a querying algorithm determines whether to solicit human input or act autonomously. We evaluate several module-selection strategies and querying algorithms in controlled synthetic experiments, revealing trade-offs between recovery efficiency, robustness to system and user variables, and user workload. Finally, we deploy the framework on a robot-assisted bite acquisition system and demonstrate, in studies involving individuals with both emulated and real mobility limitations, that it improves recovery success while reducing the workload imposed on users. Our results highlight how explicitly reasoning about both robot uncertainty and human effort can enable more efficient and user-centered failure recovery in collaborative robots. Supplementary materials and videos can be found at: http://emprise.cs.cornell.edu/modularhil
Prescribed Performance Control of Deformable Object Manipulation in Spatial Latent Space
Oct 16, 2025Manipulating three-dimensional (3D) deformable objects presents significant challenges for robotic systems due to their infinite-dimensional state space and complex deformable dynamics. This paper proposes a novel model-free approach for shape control with constraints imposed on key points. Unlike existing methods that rely on feature dimensionality reduction, the proposed controller leverages the coordinates of key points as the feature vector, which are extracted from the deformable object's point cloud using deep learning methods. This approach not only reduces the dimensionality of the feature space but also retains the spatial information of the object. By extracting key points, the manipulation of deformable objects is simplified into a visual servoing problem, where the shape dynamics are described using a deformation Jacobian matrix. To enhance control accuracy, a prescribed performance control method is developed by integrating barrier Lyapunov functions (BLF) to enforce constraints on the key points. The stability of the closed-loop system is rigorously analyzed and verified using the Lyapunov method. Experimental results further demonstrate the effectiveness and robustness of the proposed method.
Leveraging CORAL-Correlation Consistency Network for Semi-Supervised Left Atrium MRI Segmentation
Oct 21, 2024
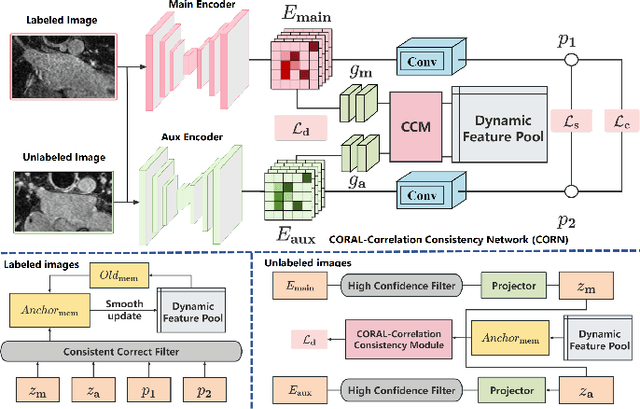
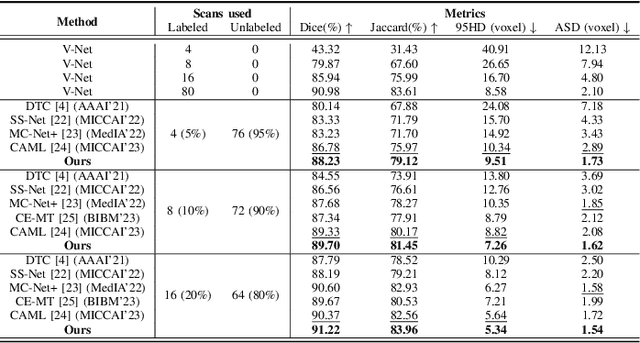
Semi-supervised learning (SSL) has been widely used to learn from both a few labeled images and many unlabeled images to overcome the scarcity of labeled samples in medical image segmentation. Most current SSL-based segmentation methods use pixel values directly to identify similar features in labeled and unlabeled data. They usually fail to accurately capture the intricate attachment structures in the left atrium, such as the areas of inconsistent density or exhibit outward curvatures, adding to the complexity of the task. In this paper, we delve into this issue and introduce an effective solution, CORAL(Correlation-Aligned)-Correlation Consistency Network (CORN), to capture the global structure shape and local details of Left Atrium. Diverging from previous methods focused on each local pixel value, the CORAL-Correlation Consistency Module (CCM) in the CORN leverages second-order statistical information to capture global structural features by minimizing the distribution discrepancy between labeled and unlabeled samples in feature space. Yet, direct construction of features from unlabeled data frequently results in ``Sample Selection Bias'', leading to flawed supervision. We thus further propose the Dynamic Feature Pool (DFP) for the CCM, which utilizes a confidence-based filtering strategy to remove incorrectly selected features and regularize both teacher and student models by constraining the similarity matrix to be consistent. Extensive experiments on the Left Atrium dataset have shown that the proposed CORN outperforms previous state-of-the-art semi-supervised learning methods.
Modal-Graph 3D Shape Servoing of Deformable Objects with Raw Point Clouds
Apr 18, 2023Deformable object manipulation (DOM) with point clouds has great potential as non-rigid 3D shapes can be measured without detecting and tracking image features. However, robotic shape control of deformable objects with point clouds is challenging due to: the unknown point-wise correspondences and the noisy partial observability of raw point clouds; the modeling difficulties of the relationship between point clouds and robot motions. To tackle these challenges, this paper introduces a novel modal-graph framework for the model-free shape servoing of deformable objects with raw point clouds. Unlike the existing works studying the object's geometry structure, our method builds a low-frequency deformation structure for the DOM system, which is robust to the measurement irregularities. The built modal representation and graph structure enable us to directly extract low-dimensional deformation features from raw point clouds. Such extraction requires no extra point processing of registrations, refinements, and occlusion removal. Moreover, to shape the object using the extracted features, we design an adaptive robust controller which is proved to be input-to-state stable (ISS) without offline learning or identifying both the physical and geometric object models. Extensive simulations and experiments are conducted to validate the effectiveness of our method for linear, planar, tubular, and solid objects under different settings.
EEG Machine Learning for Analysis of Mild Traumatic Brain Injury: A survey
Aug 10, 2022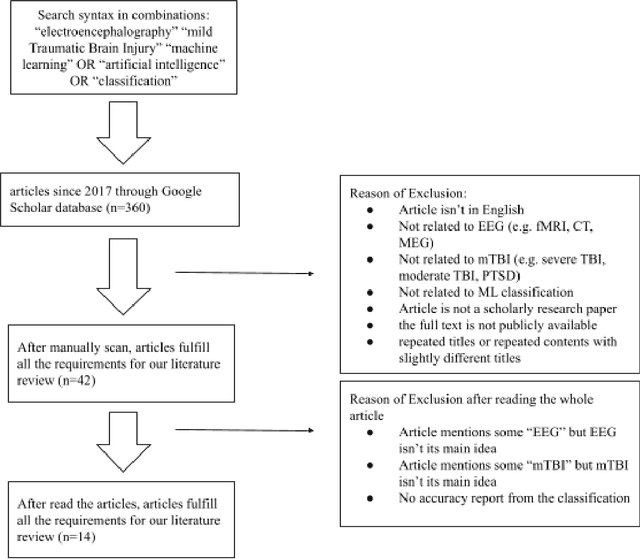
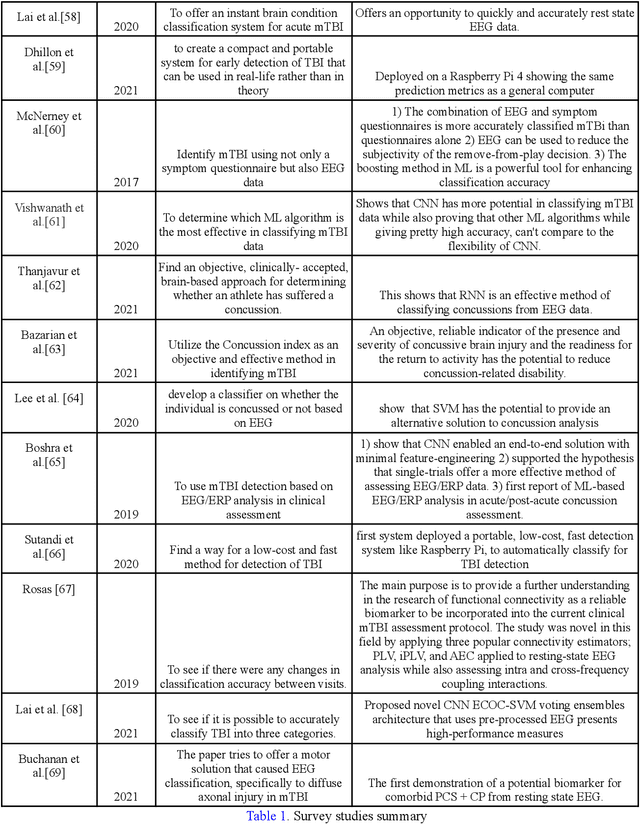
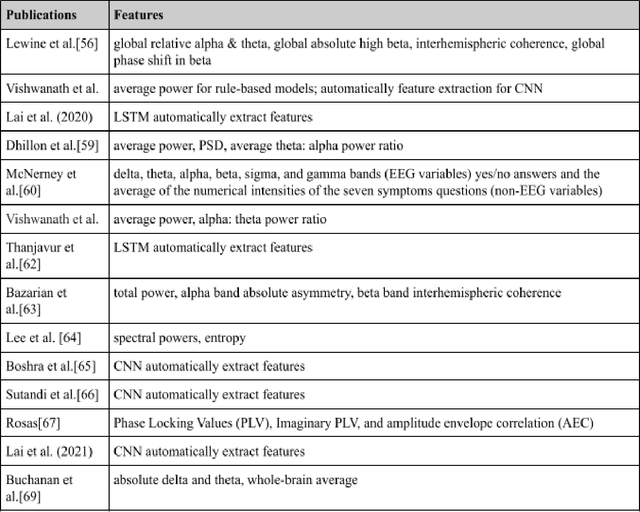
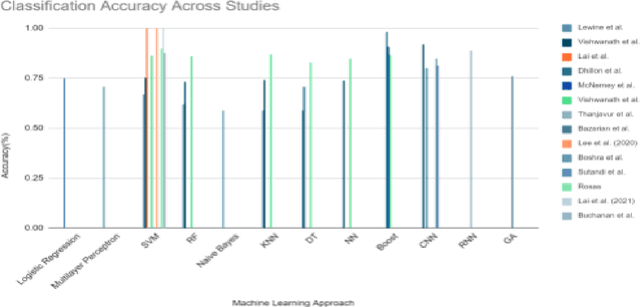
Mild Traumatic Brain Injury (mTBI) is a common brain injury and affects a diverse group of people: soldiers, constructors, athletes, drivers, children, elders, and nearly everyone. Thus, having a well-established, fast, cheap, and accurate classification method is crucial for the well-being of people around the globe. Luckily, using Machine Learning (ML) on electroencephalography (EEG) data shows promising results. This survey analyzed the most cutting-edge articles from 2017 to the present. The articles were searched from the Google Scholar database and went through an elimination process based on our criteria. We reviewed, summarized, and compared the fourteen most cutting-edge machine learning research papers for predicting and classifying mTBI in terms of 1) EEG data types, 2) data preprocessing methods, 3) machine learning feature representations, 4) feature extraction methods, and 5) machine learning classifiers and predictions. The most common EEG data type was human resting-state EEG, with most studies using filters to clean the data. The power spectral, especially alpha and theta power, was the most prevalent feature. The other non-power spectral features, such as entropy, also show their great potential. The Fourier transform is the most common feature extraction method while using neural networks as automatic feature extraction generally returns a high accuracy result. Lastly, Support Vector Machine (SVM) was our survey's most common ML classifier due to its lower computational complexity and solid mathematical theoretical basis. The purpose of this study was to collect and explore a sparsely populated sector of ML, and we hope that our survey has shined some light on the inherent trends, advantages, disadvantages, and preferences of the current state of machine learning-based EEG analysis for mTBI.
Machine Learning-based EEG Applications and Markets
Aug 10, 2022

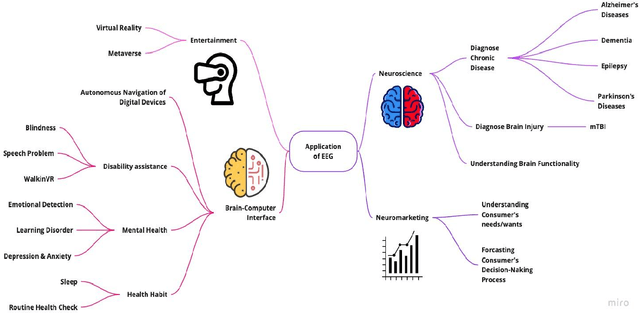
This paper addresses both the various EEG applications and the current EEG market ecosystem propelled by machine learning. Increasingly available open medical and health datasets using EEG encourage data-driven research with a promise of improving neurology for patient care through knowledge discovery and machine learning data science algorithm development. This effort leads to various kinds of EEG developments and currently forms a new EEG market. This paper attempts to do a comprehensive survey on the EEG market and covers the six significant applications of EEG, including diagnosis/screening, drug development, neuromarketing, daily health, metaverse, and age/disability assistance. The highlight of this survey is on the compare and contrast between the research field and the business market. Our survey points out the current limitations of EEG and indicates the future direction of research and business opportunity for every EEG application listed above. Based on our survey, more research on machine learning-based EEG applications will lead to a more robust EEG-related market. More companies will use the research technology and apply it to real-life settings. As the EEG-related market grows, the EEG-related devices will collect more EEG data, and there will be more EEG data available for researchers to use in their study, coming back as a virtuous cycle. Our market analysis indicates that research related to the use of EEG data and machine learning in the six applications listed above points toward a clear trend in the growth and development of the EEG ecosystem and machine learning world.