 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint Tracking in Surgery--The 2024 Surgical Tattoos in Infrared (STIR) Challenge
Mar 31, 2025Understanding tissue motion in surgery is crucial to enable applications in downstream tasks such as segmentation, 3D reconstruction, virtual tissue landmarking, autonomous probe-based scanning, and subtask autonomy. Labeled data are essential to enabling algorithms in these downstream tasks since they allow us to quantify and train algorithms. This paper introduces a point tracking challenge to address this, wherein participants can submit their algorithms for quantification. The submitted algorithms are evaluated using a dataset named surgical tattoos in infrared (STIR), with the challenge aptly named the STIR Challenge 2024. The STIR Challenge 2024 comprises two quantitative components: accuracy and efficiency. The accuracy component tests the accuracy of algorithms on in vivo and ex vivo sequences. The efficiency component tests the latency of algorithm inference. The challenge was conducted as a part of MICCAI EndoVis 2024. In this challenge, we had 8 total teams, with 4 teams submitting before and 4 submitting after challenge day. This paper details the STIR Challenge 2024, which serves to move the field towards more accurate and efficient algorithms for spatial understanding in surgery. In this paper we summarize the design, submissions, and results from the challenge. The challenge dataset is available here: https://zenodo.org/records/14803158 , and the code for baseline models and metric calculation is available here: https://github.com/athaddius/STIRMetrics
Towards Deterministic End-to-end Latency for Medical AI Systems in NVIDIA Holoscan
Feb 06, 2024
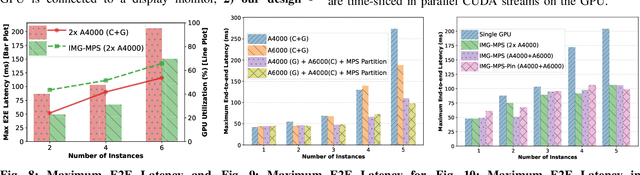


The introduction of AI and ML technologies into medical devices has revolutionized healthcare diagnostics and treatments. Medical device manufacturers are keen to maximize the advantages afforded by AI and ML by consolidating multiple applications onto a single platform. However, concurrent execution of several AI applications, each with its own visualization components, leads to unpredictable end-to-end latency, primarily due to GPU resource contentions. To mitigate this, manufacturers typically deploy separate workstations for distinct AI applications, thereby increasing financial, energy, and maintenance costs. This paper addresses these challenges within the context of NVIDIA's Holoscan platform, a real-time AI system for streaming sensor data and images. We propose a system design optimized for heterogeneous GPU workloads, encompassing both compute and graphics tasks. Our design leverages CUDA MPS for spatial partitioning of compute workloads and isolates compute and graphics processing onto separate GPUs. We demonstrate significant performance improvements across various end-to-end latency determinism metrics through empirical evaluation with real-world Holoscan medical device applications. For instance, the proposed design reduces maximum latency by 21-30% and improves latency distribution flatness by 17-25% for up to five concurrent endoscopy tool tracking AI applications, compared to a single-GPU baseline. Against a default multi-GPU setup, our optimizations decrease maximum latency by 35% for up to six concurrent applications by improving GPU utilization by 42%. This paper provides clear design insights for AI applications in the edge-computing domain including medical systems, where performance predictability of concurrent and heterogeneous GPU workloads is a critical requirement.