 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDSRC: Learning Density-insensitive and Semantic-aware Collaborative Representation against Corruptions
Dec 14, 2024



As a potential application of Vehicle-to-Everything (V2X) communication, multi-agent collaborative perception has achieved significant success in 3D object detection. While these methods have demonstrated impressive results on standard benchmarks, the robustness of such approaches in the face of complex real-world environments requires additional verification. To bridge this gap, we introduce the first comprehensive benchmark designed to evaluate the robustness of collaborative perception methods in the presence of natural corruptions typical of real-world environments. Furthermore, we propose DSRC, a robustness-enhanced collaborative perception method aiming to learn Density-insensitive and Semantic-aware collaborative Representation against Corruptions. DSRC consists of two key designs: i) a semantic-guided sparse-to-dense distillation framework, which constructs multi-view dense objects painted by ground truth bounding boxes to effectively learn density-insensitive and semantic-aware collaborative representation; ii) a feature-to-point cloud reconstruction approach to better fuse critical collaborative representation across agents. To thoroughly evaluate DSRC, we conduct extensive experiments on real-world and simulated datasets. The results demonstrate that our method outperforms SOTA collaborative perception methods in both clean and corrupted conditions. Code is available at https://github.com/Terry9a/DSRC.
The Brain-Inspired Cooperative Shared Control for Brain-Machine Interface
Oct 18, 2022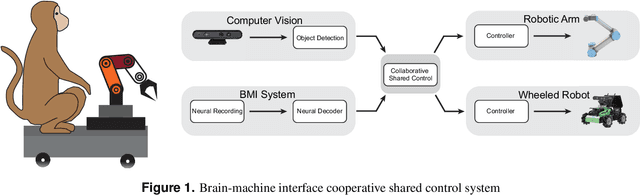
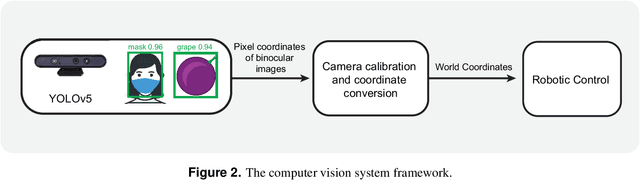

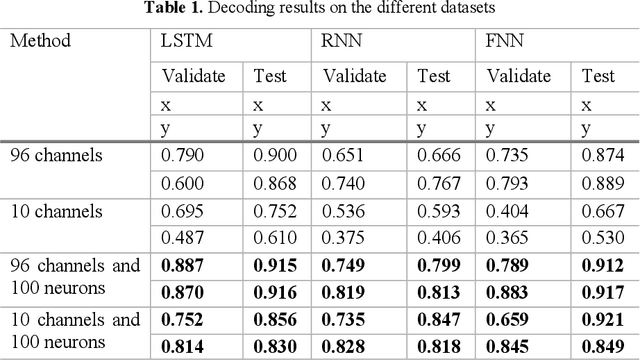
In the practical application of brain-machine interface technology, the problem often faced is the low information content and high noise of the neural signals collected by the electrode and the difficulty of decoding by the decoder, which makes it difficult for the robotic to obtain stable instructions to complete the task. The idea based on the principle of cooperative shared control can be achieved by extracting general motor commands from brain activity, while the fine details of the movement can be hosted to the robot for completion, or the brain can have complete control. This study proposes a brain-machine interface shared control system based on spiking neural networks for robotic arm movement control and wheeled robots wheel speed control and steering, respectively. The former can reliably control the robotic arm to move to the destination position, while the latter controls the wheeled robots for object tracking and map generation. The results show that the shared control based on brain-inspired intelligence can perform some typical tasks in complex environments and positively improve the fluency and ease of use of brain-machine interaction, and also demonstrate the potential of this control method in clinical applications of brain-machine interfaces.
An Adaptive Contrastive Learning Model for Spike Sorting
May 24, 2022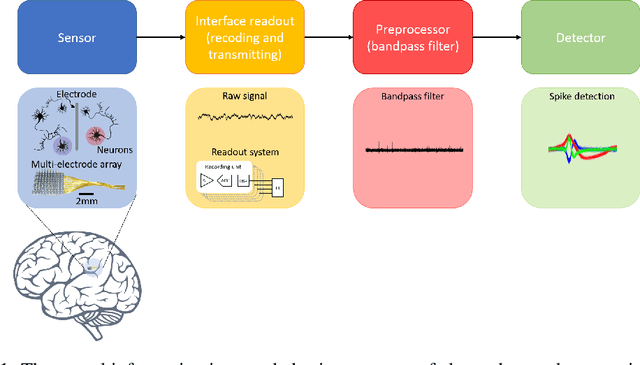
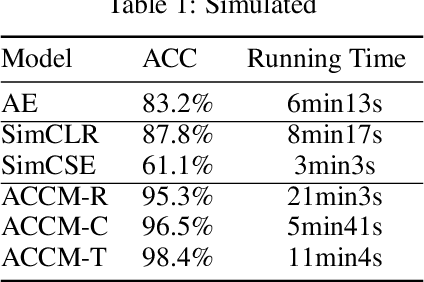
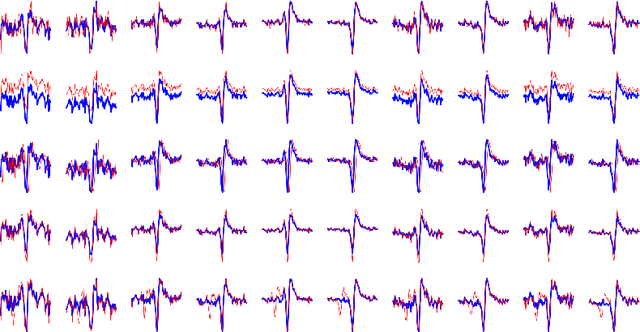

Brain-computer interfaces (BCIs), is ways for electronic devices to communicate directly with the brain. For most medical-type brain-computer interface tasks, the activity of multiple units of neurons or local field potentials is sufficient for decoding. But for BCIs used in neuroscience research, it is important to separate out the activity of individual neurons. With the development of large-scale silicon technology and the increasing number of probe channels, artificially interpreting and labeling spikes is becoming increasingly impractical. In this paper, we propose a novel modeling framework: Adaptive Contrastive Learning Model that learns representations from spikes through contrastive learning based on the maximizing mutual information loss function as a theoretical basis. Based on the fact that data with similar features share the same labels whether they are multi-classified or binary-classified. With this theoretical support, we simplify the multi-classification problem into multiple binary-classification, improving both the accuracy and the runtime efficiency. Moreover, we also introduce a series of enhancements for the spikes, while solving the problem that the classification effect is affected because of the overlapping spikes.
An Introductory Review of Spiking Neural Network and Artificial Neural Network: From Biological Intelligence to Artificial Intelligence
Apr 09, 2022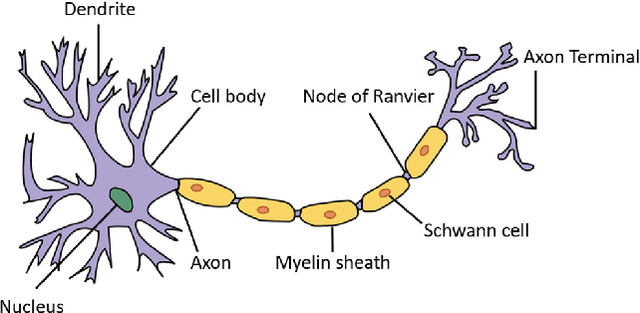
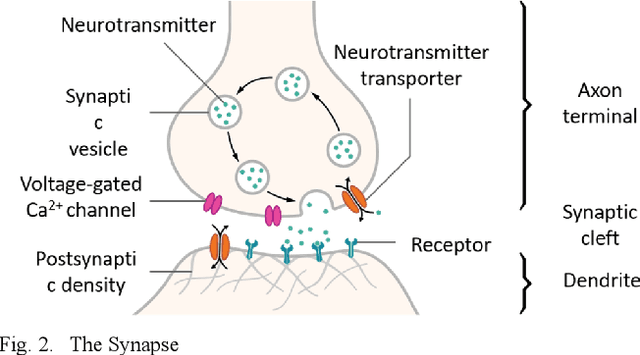

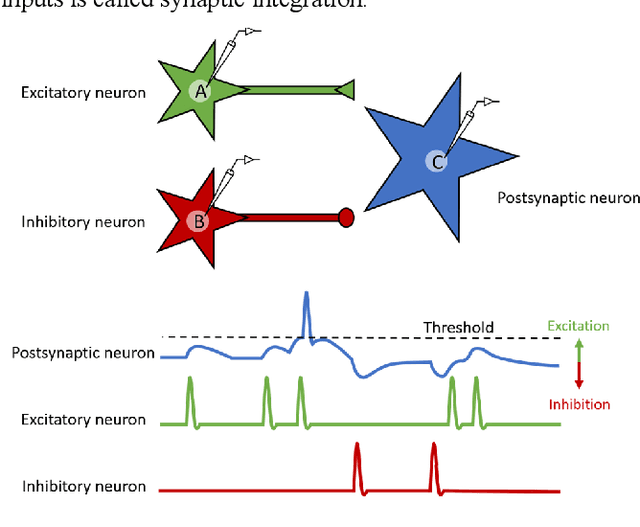
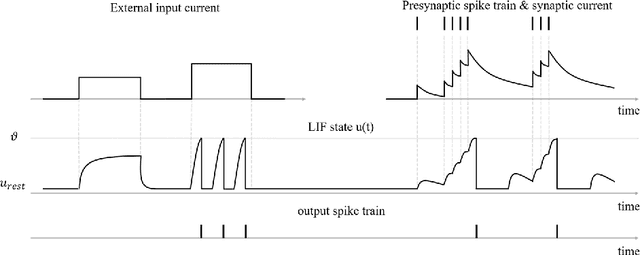
Recently, stemming from the rapid development of artificial intelligence, which has gained expansive success in pattern recognition, robotics, and bioinformatics, neuroscience is also gaining tremendous progress. A kind of spiking neural network with biological interpretability is gradually receiving wide attention, and this kind of neural network is also regarded as one of the directions toward general artificial intelligence. This review introduces the following sections, the biological background of spiking neurons and the theoretical basis, different neuronal models, the connectivity of neural circuits, the mainstream neural network learning mechanisms and network architectures, etc. This review hopes to attract different researchers and advance the development of brain-inspired intelligence and artificial intelligence.
A Spiking Neural Network based on Neural Manifold for Augmenting Intracortical Brain-Computer Interface Data
Mar 26, 2022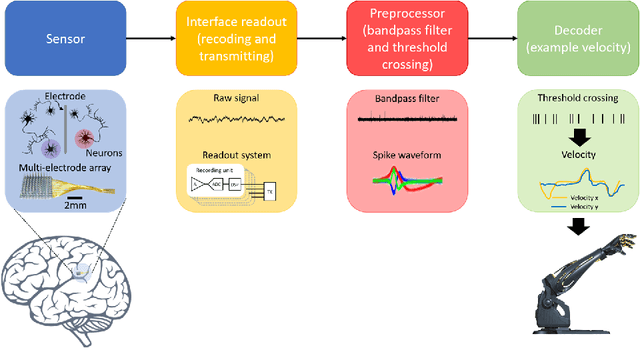
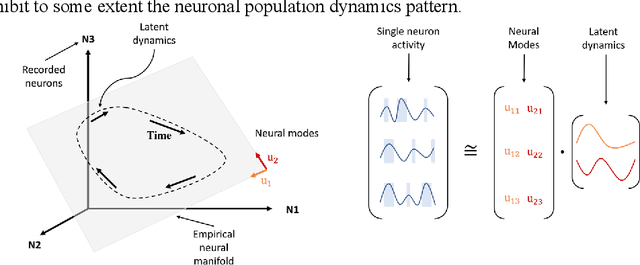
Brain-computer interfaces (BCIs), transform neural signals in the brain into in-structions to control external devices. However, obtaining sufficient training data is difficult as well as limited. With the advent of advanced machine learning methods, the capability of brain-computer interfaces has been enhanced like never before, however, these methods require a large amount of data for training and thus require data augmentation of the limited data available. Here, we use spiking neural networks (SNN) as data generators. It is touted as the next-generation neu-ral network and is considered as one of the algorithms oriented to general artifi-cial intelligence because it borrows the neural information processing from bio-logical neurons. We use the SNN to generate neural spike information that is bio-interpretable and conforms to the intrinsic patterns in the original neural data. Ex-periments show that the model can directly synthesize new spike trains, which in turn improves the generalization ability of the BCI decoder. Both the input and output of the spiking neural model are spike information, which is a brain-inspired intelligence approach that can be better integrated with BCI in the future.