 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFLEX-MoE: Federated Mixture-of-Experts with Load-balanced Expert Assignment
Dec 28, 2025Mixture-of-Experts (MoE) models enable scalable neural networks through conditional computation. However, their deployment with federated learning (FL) faces two critical challenges: 1) resource-constrained edge devices cannot store full expert sets, and 2) non-IID data distributions cause severe expert load imbalance that degrades model performance. To this end, we propose \textbf{FLEX-MoE}, a novel federated MoE framework that jointly optimizes expert assignment and load balancing under limited client capacity. Specifically, our approach introduces client-expert fitness scores that quantify the expert suitability for local datasets through training feedback, and employs an optimization-based algorithm to maximize client-expert specialization while enforcing balanced expert utilization system-wide. Unlike existing greedy methods that focus solely on personalization while ignoring load imbalance, our FLEX-MoE is capable of addressing the expert utilization skew, which is particularly severe in FL settings with heterogeneous data. Our comprehensive experiments on three different datasets demonstrate the superior performance of the proposed FLEX-MoE, together with its ability to maintain balanced expert utilization across diverse resource-constrained scenarios.
Pruning and Malicious Injection: A Retraining-Free Backdoor Attack on Transformer Models
Aug 14, 2025Transformer models have demonstrated exceptional performance and have become indispensable in computer vision (CV) and natural language processing (NLP) tasks. However, recent studies reveal that transformers are susceptible to backdoor attacks. Prior backdoor attack methods typically rely on retraining with clean data or altering the model architecture, both of which can be resource-intensive and intrusive. In this paper, we propose Head-wise Pruning and Malicious Injection (HPMI), a novel retraining-free backdoor attack on transformers that does not alter the model's architecture. Our approach requires only a small subset of the original data and basic knowledge of the model architecture, eliminating the need for retraining the target transformer. Technically, HPMI works by pruning the least important head and injecting a pre-trained malicious head to establish the backdoor. We provide a rigorous theoretical justification demonstrating that the implanted backdoor resists detection and removal by state-of-the-art defense techniques, under reasonable assumptions. Experimental evaluations across multiple datasets further validate the effectiveness of HPMI, showing that it 1) incurs negligible clean accuracy loss, 2) achieves at least 99.55% attack success rate, and 3) bypasses four advanced defense mechanisms. Additionally, relative to state-of-the-art retraining-dependent attacks, HPMI achieves greater concealment and robustness against diverse defense strategies, while maintaining minimal impact on clean accuracy.
Revisiting Adversarial Perception Attacks and Defense Methods on Autonomous Driving Systems
May 14, 2025Autonomous driving systems (ADS) increasingly rely on deep learning-based perception models, which remain vulnerable to adversarial attacks. In this paper, we revisit adversarial attacks and defense methods, focusing on road sign recognition and lead object detection and prediction (e.g., relative distance). Using a Level-2 production ADS, OpenPilot by Comma.ai, and the widely adopted YOLO model, we systematically examine the impact of adversarial perturbations and assess defense techniques, including adversarial training, image processing, contrastive learning, and diffusion models. Our experiments highlight both the strengths and limitations of these methods in mitigating complex attacks. Through targeted evaluations of model robustness, we aim to provide deeper insights into the vulnerabilities of ADS perception systems and contribute guidance for developing more resilient defense strategies.
DualGFL: Federated Learning with a Dual-Level Coalition-Auction Game
Dec 20, 2024Despite some promising results in federated learning using game-theoretical methods, most existing studies mainly employ a one-level game in either a cooperative or competitive environment, failing to capture the complex dynamics among participants in practice. To address this issue, we propose DualGFL, a novel Federated Learning framework with a Dual-level Game in cooperative-competitive environments. DualGFL includes a lower-level hedonic game where clients form coalitions and an upper-level multi-attribute auction game where coalitions bid for training participation. At the lower-level DualGFL, we introduce a new auction-aware utility function and propose a Pareto-optimal partitioning algorithm to find a Pareto-optimal partition based on clients' preference profiles. At the upper-level DualGFL, we formulate a multi-attribute auction game with resource constraints and derive equilibrium bids to maximize coalitions' winning probabilities and profits. A greedy algorithm is proposed to maximize the utility of the central server. Extensive experiments on real-world datasets demonstrate DualGFL's effectiveness in improving both server utility and client utility.
Personalized Federated Deep Reinforcement Learning-based Trajectory Optimization for Multi-UAV Assisted Edge Computing
Sep 05, 2023In the era of 5G mobile communication, there has been a significant surge in research focused on unmanned aerial vehicles (UAVs) and mobile edge computing technology. UAVs can serve as intelligent servers in edge computing environments, optimizing their flight trajectories to maximize communication system throughput. Deep reinforcement learning (DRL)-based trajectory optimization algorithms may suffer from poor training performance due to intricate terrain features and inadequate training data. To overcome this limitation, some studies have proposed leveraging federated learning (FL) to mitigate the data isolation problem and expedite convergence. Nevertheless, the efficacy of global FL models can be negatively impacted by the high heterogeneity of local data, which could potentially impede the training process and even compromise the performance of local agents. This work proposes a novel solution to address these challenges, namely personalized federated deep reinforcement learning (PF-DRL), for multi-UAV trajectory optimization. PF-DRL aims to develop individualized models for each agent to address the data scarcity issue and mitigate the negative impact of data heterogeneity. Simulation results demonstrate that the proposed algorithm achieves superior training performance with faster convergence rates, and improves service quality compared to other DRL-based approaches.
Energy and Spectrum Efficient Federated Learning via High-Precision Over-the-Air Computation
Aug 15, 2022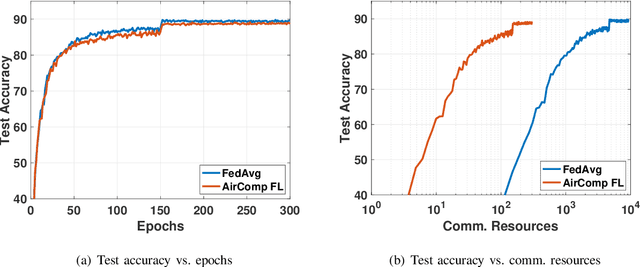
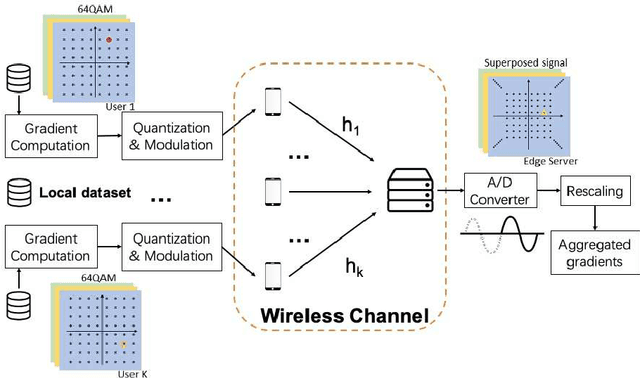
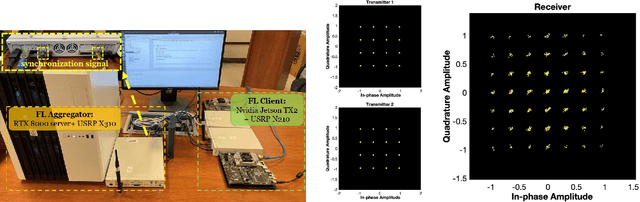
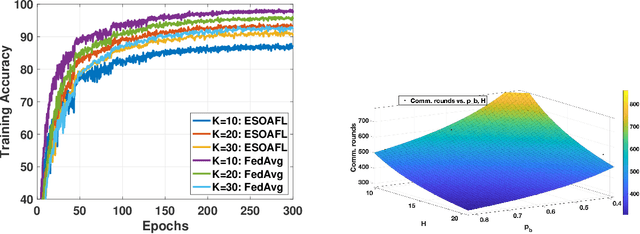
Federated learning (FL) enables mobile devices to collaboratively learn a shared prediction model while keeping data locally. However, there are two major research challenges to practically deploy FL over mobile devices: (i) frequent wireless updates of huge size gradients v.s. limited spectrum resources, and (ii) energy-hungry FL communication and local computing during training v.s. battery-constrained mobile devices. To address those challenges, in this paper, we propose a novel multi-bit over-the-air computation (M-AirComp) approach for spectrum-efficient aggregation of local model updates in FL and further present an energy-efficient FL design for mobile devices. Specifically, a high-precision digital modulation scheme is designed and incorporated in the M-AirComp, allowing mobile devices to upload model updates at the selected positions simultaneously in the multi-access channel. Moreover, we theoretically analyze the convergence property of our FL algorithm. Guided by FL convergence analysis, we formulate a joint transmission probability and local computing control optimization, aiming to minimize the overall energy consumption (i.e., iterative local computing + multi-round communications) of mobile devices in FL. Extensive simulation results show that our proposed scheme outperforms existing ones in terms of spectrum utilization, energy efficiency, and learning accuracy.
Robotic Communications for 5G and Beyond: Challenges and Research Opportunities
Dec 09, 2020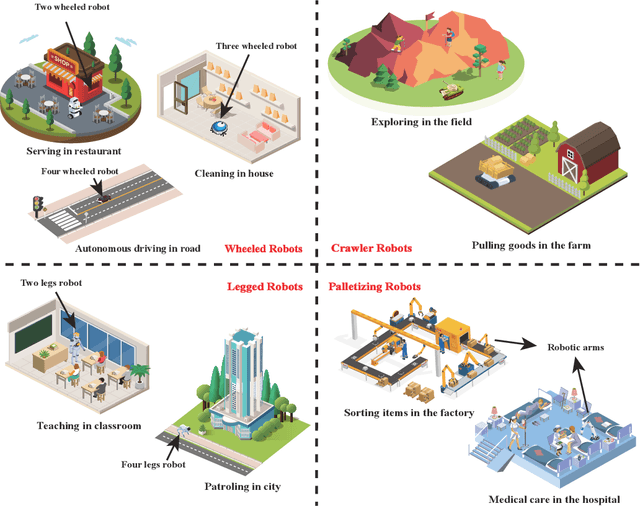
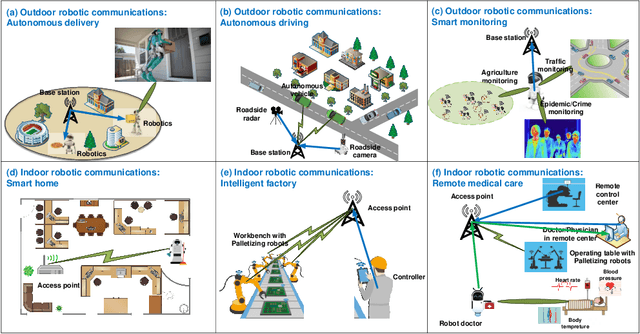
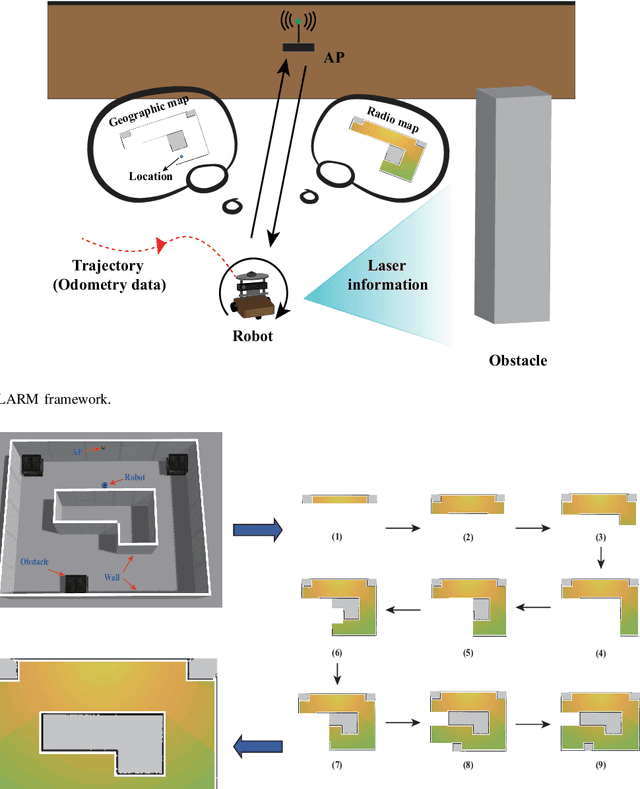
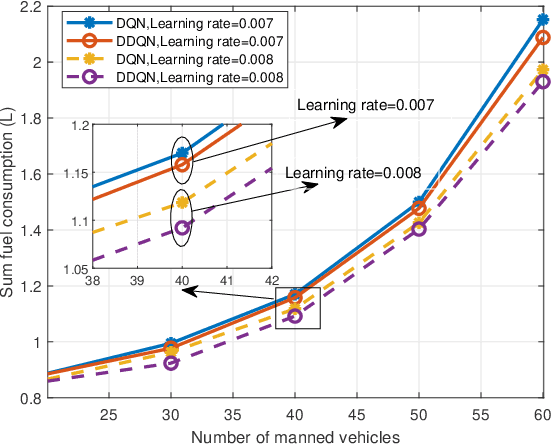
The ongoing surge in applications of robotics brings both opportunities and challenges for the fifth-generation (5G) and beyond (B5G) of communication networks. This article focuses on 5G/B5G-enabled terrestrial robotic communications with an emphasis on distinct characteristics of such communications. Firstly, signal and spatial modeling for robotic communications are presented. To elaborate further, both the benefits and challenges derived from robots' mobility are discussed. As a further advance, a novel simultaneous localization and radio mapping (SLARM) framework is proposed for integrating localization and communications into robotic networks. Furthermore, dynamic trajectory design and resource allocation for both indoor and outdoor robots are provided to verify the performance of robotic communications in the context of typical robotic application scenarios.