 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-guaranteed and Goal-oriented Semantic Sensing, Communication, and Control for Robotics
Mar 13, 2026Wirelessly-connected robotic system empowers robots with real-time intelligence by leveraging remote computing resources for decision-making. However, the data exchange between robots and base stations often overwhelms communication links, introducing latency that undermines real-time response. To tackle this, goal-oriented semantic communication (GSC) has been introduced into wirelessly-connected robotic systems to extract and transmit only goal-relevant semantic representations, enhancing communication efficiency and task effectiveness. However, existing GSC approaches focused primarily on optimizing effectiveness metrics while overlooking safety requirements, which should be treated as the top priority in real-world robotic systems. To bridge this gap, we propose safety-guaranteed and goal-oriented semantic communication for wirelessly-connected robotic system, aiming to maximize the robotic task effectiveness subject to practical operational safety requirements. We first summarize the general safety requirements and effectiveness metrics across typical robotic tasks, including robot arm grasping, unmanned aerial vehicle (UAV)-assisted tasks, and multi-robot exploration. We then systematically analyze the unique safety and effectiveness challenges faced by wirelessly-connected robotic system in sensing, communication, and control. Based on these, we further present potential safety-guaranteed and goal-oriented sensing, communication, and control solutions. Finally, a UAV target tracking case study validates that our proposed GSC solutions can significantly improve safety rate and tracking success rate by more than 2 times and 4.5 times, respectively.
Goal-Oriented Semantic Communication for ISAC-Enabled Robotic Obstacle Avoidance
Mar 02, 2026We investigate an integrated sensing and communication (ISAC)-enabled BS for the unmanned aerial vehicle (UAV) obstacle avoidance task, and propose a goal-oriented semantic communication (GOSC) framework for the BS to transmit sensing and command and control (C&C) signals efficiently and effectively. Our GOSC framework establishes a closed loop for sensing-C&C generation-sensing and C&C transmission: For sensing, a Kalman filter (KF) is applied to continuously predict UAV positions, mitigating the reliance of UAV position acquisition on continuous sensing signal transmission, and enhancing position estimation accuracy through sensing-prediction fusion. Based on the refined estimation position provided by the KF, we develop a Mahalanobis distance-based dynamic window approach (MD-DWA) to generate precise C&C signals under uncertainty, in which we derive the mathematical expression of the minimum Mahalanobis distance required to guarantee collision avoidance. Finally, for efficient sensing and C&C signal transmission, we propose an effectiveness-aware deep Q-network (E-DQN) to determine the transmission of sensing and C&C signals based on their value of information (VoI). The VoI of sensing signals is quantified by the reduction in uncertainty entropy of UAV's position estimation, while the VoI of C&C signals is measured by their contribution to UAV navigation improvement. Extensive simulations validate the effectiveness of our proposed GOSC framework. Compared to the conventional ISAC transmission framework that transmits sensing and C&C signals at every time slot, GOSC achieves the same 100% task success rate while reducing the number of transmitted sensing and C&C signals by 92.4% and the number of transmission time slots by 85.5%.
Bridging Physically Based Rendering and Diffusion Models with Stochastic Differential Equation
Feb 24, 2026Diffusion-based image generators excel at producing realistic content from text or image conditions, but they offer only limited explicit control over low-level, physically grounded shading and material properties. In contrast, physically based rendering (PBR) offers fine-grained physical control but lacks prompt-driven flexibility. Although these two paradigms originate from distinct communities, both share a common evolution -- from noisy observations to clean images. In this paper, we propose a unified stochastic formulation that bridges Monte Carlo rendering and diffusion-based generative modeling. First, a general stochastic differential equation (SDE) formulation for Monte Carlo integration under the Central Limit Theorem is modeled. Through instantiation via physically based path tracing, we convert it into a physically grounded SDE representation. Moreover, we provide a systematic analysis of how the physical characteristics of path tracing can be extended to existing diffusion models from the perspective of noise variance. Extensive experiments across multiple tasks show that our method can exert physically grounded control over diffusion-generated results, covering tasks such as rendering and material editing.
Analysis of Converged 3D Gaussian Splatting Solutions: Density Effects and Prediction Limit
Feb 09, 2026We investigate what structure emerges in 3D Gaussian Splatting (3DGS) solutions from standard multi-view optimization. We term these Rendering-Optimal References (RORs) and analyze their statistical properties, revealing stable patterns: mixture-structured scales and bimodal radiance across diverse scenes. To understand what determines these parameters, we apply learnability probes by training predictors to reconstruct RORs from point clouds without rendering supervision. Our analysis uncovers fundamental density-stratification. Dense regions exhibit geometry-correlated parameters amenable to render-free prediction, while sparse regions show systematic failure across architectures. We formalize this through variance decomposition, demonstrating that visibility heterogeneity creates covariance-dominated coupling between geometric and appearance parameters in sparse regions. This reveals the dual character of RORs: geometric primitives where point clouds suffice, and view synthesis primitives where multi-view constraints are essential. We provide density-aware strategies that improve training robustness and discuss architectural implications for systems that adaptively balance feed-forward prediction and rendering-based refinement.
ViCA: Efficient Multimodal LLMs with Vision-Only Cross-Attention
Feb 07, 2026Modern multimodal large language models (MLLMs) adopt a unified self-attention design that processes visual and textual tokens at every Transformer layer, incurring substantial computational overhead. In this work, we revisit the necessity of such dense visual processing and show that projected visual embeddings are already well-aligned with the language space, while effective vision-language interaction occurs in only a small subset of layers. Based on these insights, we propose ViCA (Vision-only Cross-Attention), a minimal MLLM architecture in which visual tokens bypass all self-attention and feed-forward layers, interacting with text solely through sparse cross-attention at selected layers. Extensive evaluations across three MLLM backbones, nine multimodal benchmarks, and 26 pruning-based baselines show that ViCA preserves 98% of baseline accuracy while reducing visual-side computation to 4%, consistently achieving superior performance-efficiency trade-offs. Moreover, ViCA provides a regular, hardware-friendly inference pipeline that yields over 3.5x speedup in single-batch inference and over 10x speedup in multi-batch inference, reducing visual grounding to near-zero overhead compared with text-only LLMs. It is also orthogonal to token pruning methods and can be seamlessly combined for further efficiency gains. Our code is available at https://github.com/EIT-NLP/ViCA.
Deep-Learning-Based Control of a Decoupled Two-Segment Continuum Robot for Endoscopic Submucosal Dissection
Feb 03, 2026Manual endoscopic submucosal dissection (ESD) is technically demanding, and existing single-segment robotic tools offer limited dexterity. These limitations motivate the development of more advanced solutions. To address this, DESectBot, a novel dual segment continuum robot with a decoupled structure and integrated surgical forceps, enabling 6 degrees of freedom (DoFs) tip dexterity for improved lesion targeting in ESD, was developed in this work. Deep learning controllers based on gated recurrent units (GRUs) for simultaneous tip position and orientation control, effectively handling the nonlinear coupling between continuum segments, were proposed. The GRU controller was benchmarked against Jacobian based inverse kinematics, model predictive control (MPC), a feedforward neural network (FNN), and a long short-term memory (LSTM) network. In nested-rectangle and Lissajous trajectory tracking tasks, the GRU achieved the lowest position/orientation RMSEs: 1.11 mm/ 4.62° and 0.81 mm/ 2.59°, respectively. For orientation control at a fixed position (four target poses), the GRU attained a mean RMSE of 0.14 mm and 0.72°, outperforming all alternatives. In a peg transfer task, the GRU achieved a 100% success rate (120 success/120 attempts) with an average transfer time of 11.8s, the STD significantly outperforms novice-controlled systems. Additionally, an ex vivo ESD demonstration grasping, elevating, and resecting tissue as the scalpel completed the cut confirmed that DESectBot provides sufficient stiffness to divide thick gastric mucosa and an operative workspace adequate for large lesions.These results confirm that GRU-based control significantly enhances precision, reliability, and usability in ESD surgical training scenarios.
Dual-Kernel Graph Community Contrastive Learning
Nov 11, 2025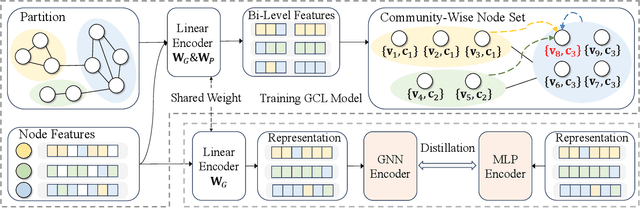
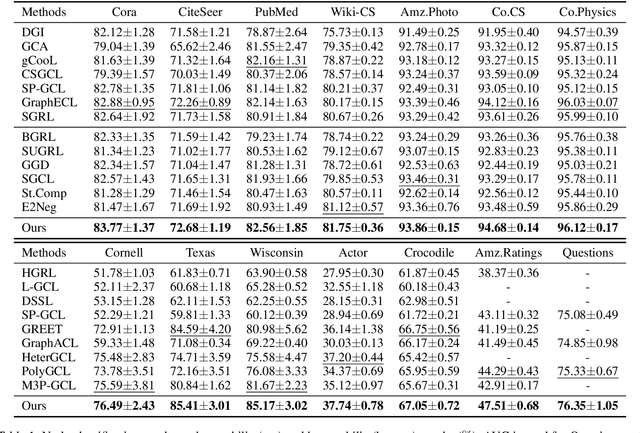
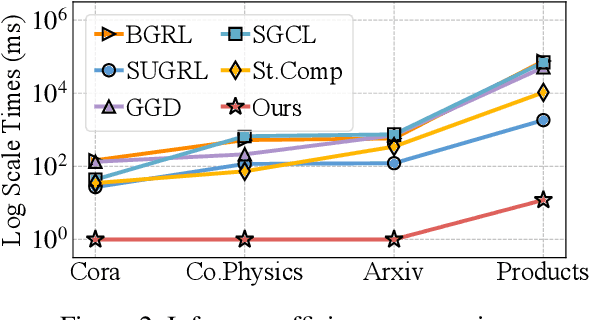
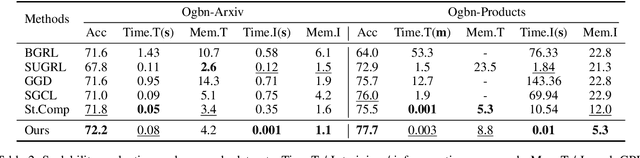
Graph Contrastive Learning (GCL) has emerged as a powerful paradigm for training Graph Neural Networks (GNNs) in the absence of task-specific labels. However, its scalability on large-scale graphs is hindered by the intensive message passing mechanism of GNN and the quadratic computational complexity of contrastive loss over positive and negative node pairs. To address these issues, we propose an efficient GCL framework that transforms the input graph into a compact network of interconnected node sets while preserving structural information across communities. We firstly introduce a kernelized graph community contrastive loss with linear complexity, enabling effective information transfer among node sets to capture hierarchical structural information of the graph. We then incorporate a knowledge distillation technique into the decoupled GNN architecture to accelerate inference while maintaining strong generalization performance. Extensive experiments on sixteen real-world datasets of varying scales demonstrate that our method outperforms state-of-the-art GCL baselines in both effectiveness and scalability.
AsyncFlow: An Asynchronous Streaming RL Framework for Efficient LLM Post-Training
Jul 02, 2025Reinforcement learning (RL) has become a pivotal technology in the post-training phase of large language models (LLMs). Traditional task-colocated RL frameworks suffer from significant scalability bottlenecks, while task-separated RL frameworks face challenges in complex dataflows and the corresponding resource idling and workload imbalance. Moreover, most existing frameworks are tightly coupled with LLM training or inference engines, making it difficult to support custom-designed engines. To address these challenges, we propose AsyncFlow, an asynchronous streaming RL framework for efficient post-training. Specifically, we introduce a distributed data storage and transfer module that provides a unified data management and fine-grained scheduling capability in a fully streamed manner. This architecture inherently facilitates automated pipeline overlapping among RL tasks and dynamic load balancing. Moreover, we propose a producer-consumer-based asynchronous workflow engineered to minimize computational idleness by strategically deferring parameter update process within staleness thresholds. Finally, the core capability of AsynFlow is architecturally decoupled from underlying training and inference engines and encapsulated by service-oriented user interfaces, offering a modular and customizable user experience. Extensive experiments demonstrate an average of 1.59 throughput improvement compared with state-of-the-art baseline. The presented architecture in this work provides actionable insights for next-generation RL training system designs.
DocShaDiffusion: Diffusion Model in Latent Space for Document Image Shadow Removal
Jul 02, 2025



Document shadow removal is a crucial task in the field of document image enhancement. However, existing methods tend to remove shadows with constant color background and ignore color shadows. In this paper, we first design a diffusion model in latent space for document image shadow removal, called DocShaDiffusion. It translates shadow images from pixel space to latent space, enabling the model to more easily capture essential features. To address the issue of color shadows, we design a shadow soft-mask generation module (SSGM). It is able to produce accurate shadow mask and add noise into shadow regions specially. Guided by the shadow mask, a shadow mask-aware guided diffusion module (SMGDM) is proposed to remove shadows from document images by supervising the diffusion and denoising process. We also propose a shadow-robust perceptual feature loss to preserve details and structures in document images. Moreover, we develop a large-scale synthetic document color shadow removal dataset (SDCSRD). It simulates the distribution of realistic color shadows and provides powerful supports for the training of models. Experiments on three public datasets validate the proposed method's superiority over state-of-the-art. Our code and dataset will be publicly available.
GT^2-GS: Geometry-aware Texture Transfer for Gaussian Splatting
May 21, 2025



Transferring 2D textures to 3D modalities is of great significance for improving the efficiency of multimedia content creation. Existing approaches have rarely focused on transferring image textures onto 3D representations. 3D style transfer methods are capable of transferring abstract artistic styles to 3D scenes. However, these methods often overlook the geometric information of the scene, which makes it challenging to achieve high-quality 3D texture transfer results. In this paper, we present GT^2-GS, a geometry-aware texture transfer framework for gaussian splitting. From the perspective of matching texture features with geometric information in rendered views, we identify the issue of insufficient texture features and propose a geometry-aware texture augmentation module to expand the texture feature set. Moreover, a geometry-consistent texture loss is proposed to optimize texture features into the scene representation. This loss function incorporates both camera pose and 3D geometric information of the scene, enabling controllable texture-oriented appearance editing. Finally, a geometry preservation strategy is introduced. By alternating between the texture transfer and geometry correction stages over multiple iterations, this strategy achieves a balance between learning texture features and preserving geometric integrity. Extensive experiments demonstrate the effectiveness and controllability of our method. Through geometric awareness, our approach achieves texture transfer results that better align with human visual perception. Our homepage is available at https://vpx-ecnu.github.io/GT2-GS-website.