 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDerivative-Free & Order-Robust Optimisation
Oct 22, 2019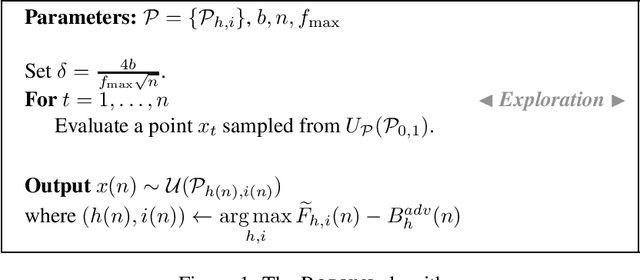
In this paper, we formalise order-robust optimisation as an instance of online learning minimising simple regret, and propose Vroom, a zero'th order optimisation algorithm capable of achieving vanishing regret in non-stationary environments, while recovering favorable rates under stochastic reward-generating processes. Our results are the first to target simple regret definitions in adversarial scenarios unveiling a challenge that has been rarely considered in prior work.
MANAS: Multi-Agent Neural Architecture Search
Sep 05, 2019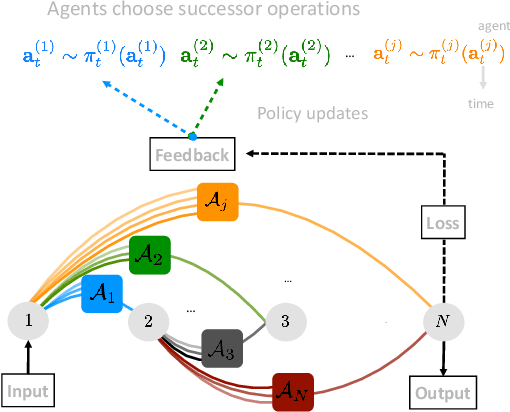
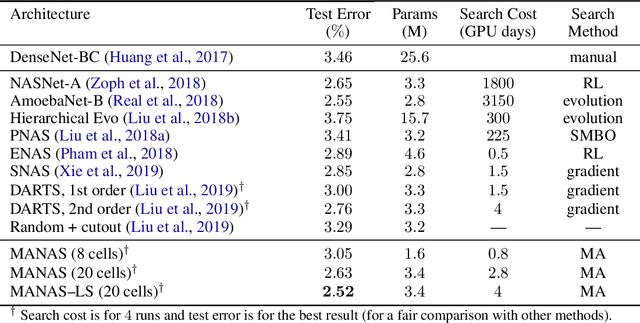
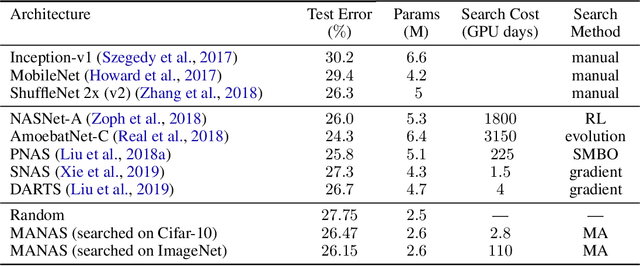
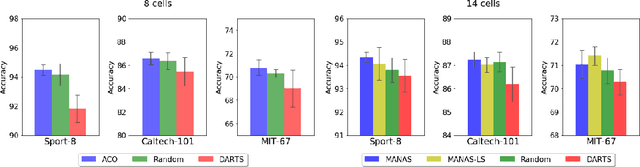
The Neural Architecture Search (NAS) problem is typically formulated as a graph search problem where the goal is to learn the optimal operations over edges in order to maximise a graph-level global objective. Due to the large architecture parameter space, efficiency is a key bottleneck preventing NAS from its practical use. In this paper, we address the issue by framing NAS as a multi-agent problem where agents control a subset of the network and coordinate to reach optimal architectures. We provide two distinct lightweight implementations, with reduced memory requirements (1/8th of state-of-the-art), and performances above those of much more computationally expensive methods. Theoretically, we demonstrate vanishing regrets of the form O(sqrt(T)), with T being the total number of rounds. Finally, aware that random search is an, often ignored, effective baseline we perform additional experiments on 3 alternative datasets and 2 network configurations, and achieve favourable results in comparison.
A simple parameter-free and adaptive approach to optimization under a minimal local smoothness assumption
Oct 01, 2018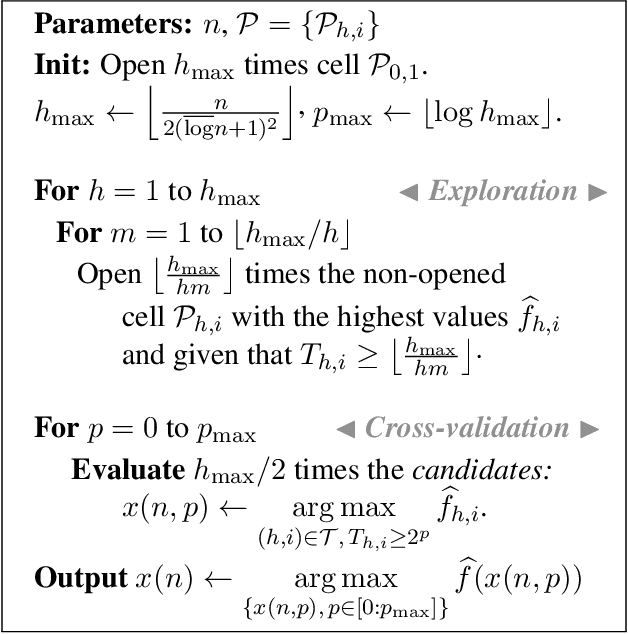
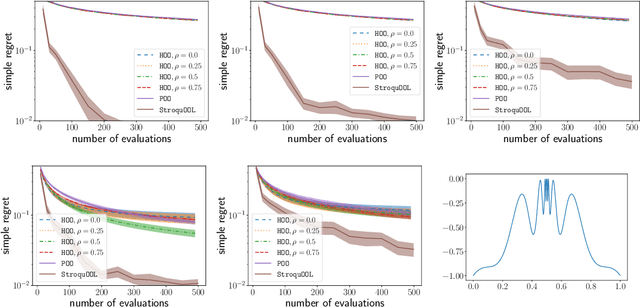
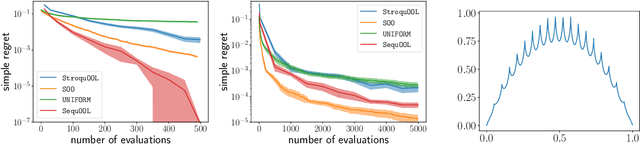

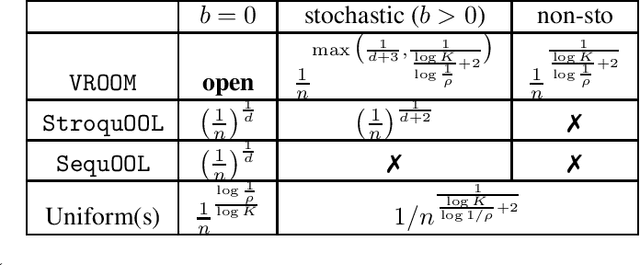
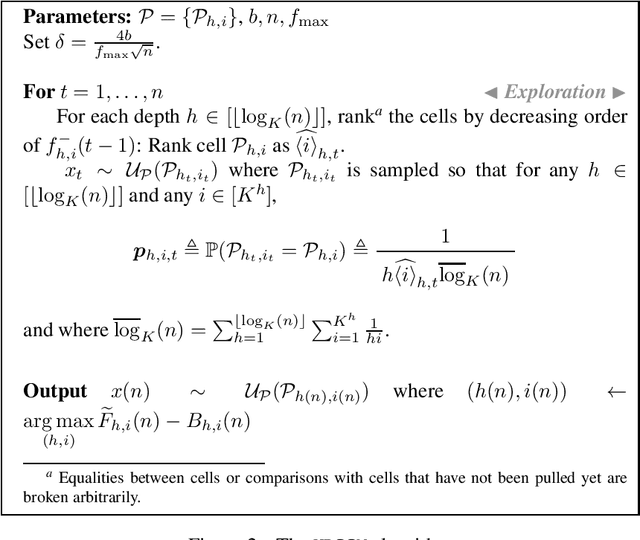
We study the problem of optimizing a function under a \emph{budgeted number of evaluations}. We only assume that the function is \emph{locally} smooth around one of its global optima. The difficulty of optimization is measured in terms of 1) the amount of \emph{noise} $b$ of the function evaluation and 2) the local smoothness, $d$, of the function. A smaller $d$ results in smaller optimization error. We come with a new, simple, and parameter-free approach. First, for all values of $b$ and $d$, this approach recovers at least the state-of-the-art regret guarantees. Second, our approach additionally obtains these results while being \textit{agnostic} to the values of both $b$ and $d$. This leads to the first algorithm that naturally adapts to an \textit{unknown} range of noise $b$ and leads to significant improvements in a moderate and low-noise regime. Third, our approach also obtains a remarkable improvement over the state-of-the-art \SOO algorithm when the noise is very low which includes the case of optimization under deterministic feedback ($b=0$). There, under our minimal local smoothness assumption, this improvement is of exponential magnitude and holds for a class of functions that covers the vast majority of functions that practitioners optimize ($d=0$). We show that our algorithmic improvement is also borne out in the numerical experiments, where we empirically show faster convergence on common benchmark functions.
Hit-and-Run for Sampling and Planning in Non-Convex Spaces
Oct 19, 2016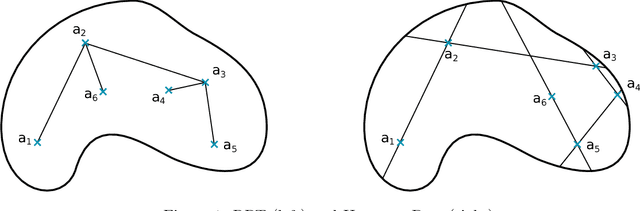
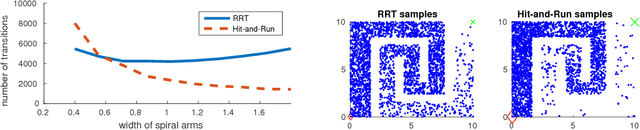
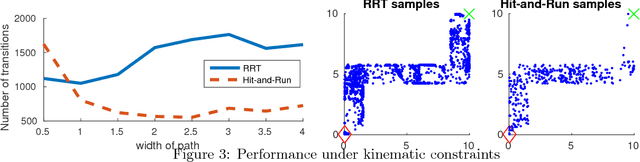
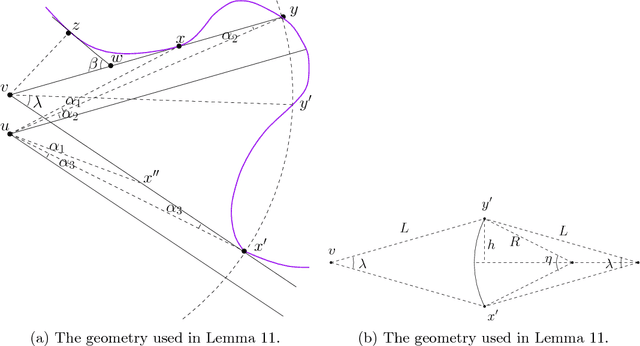
We propose the Hit-and-Run algorithm for planning and sampling problems in non-convex spaces. For sampling, we show the first analysis of the Hit-and-Run algorithm in non-convex spaces and show that it mixes fast as long as certain smoothness conditions are satisfied. In particular, our analysis reveals an intriguing connection between fast mixing and the existence of smooth measure-preserving mappings from a convex space to the non-convex space. For planning, we show advantages of Hit-and-Run compared to state-of-the-art planning methods such as Rapidly-Exploring Random Trees.
Approximate Modified Policy Iteration
May 18, 2012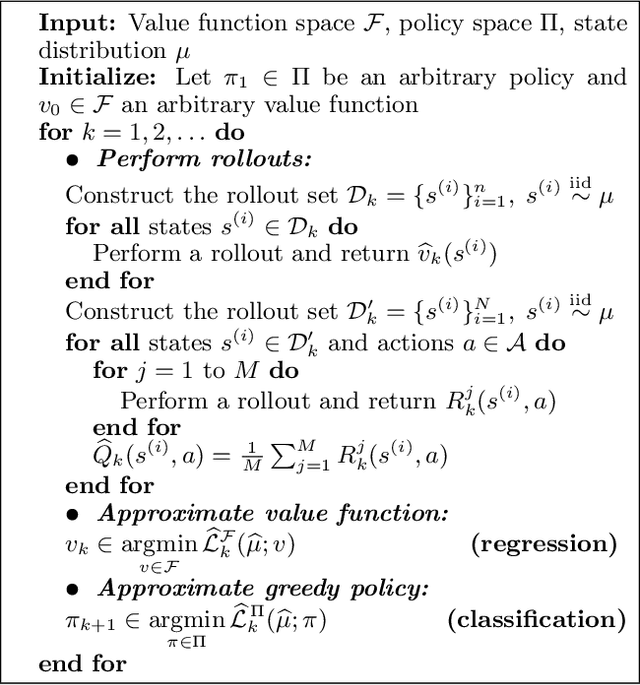
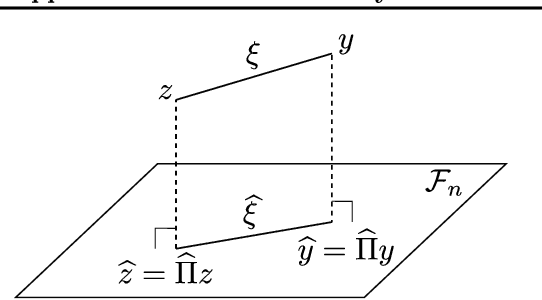
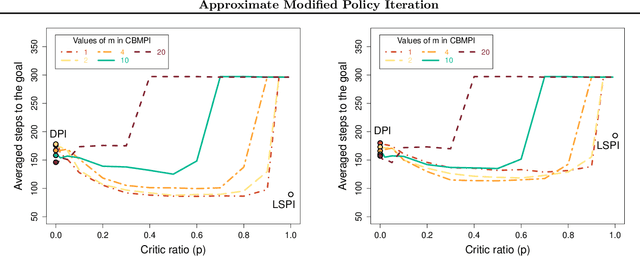
Modified policy iteration (MPI) is a dynamic programming (DP) algorithm that contains the two celebrated policy and value iteration methods. Despite its generality, MPI has not been thoroughly studied, especially its approximation form which is used when the state and/or action spaces are large or infinite. In this paper, we propose three implementations of approximate MPI (AMPI) that are extensions of well-known approximate DP algorithms: fitted-value iteration, fitted-Q iteration, and classification-based policy iteration. We provide error propagation analyses that unify those for approximate policy and value iteration. On the last classification-based implementation, we develop a finite-sample analysis that shows that MPI's main parameter allows to control the balance between the estimation error of the classifier and the overall value function approximation.