 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximate Modified Policy Iteration
Paper and Code
May 18, 2012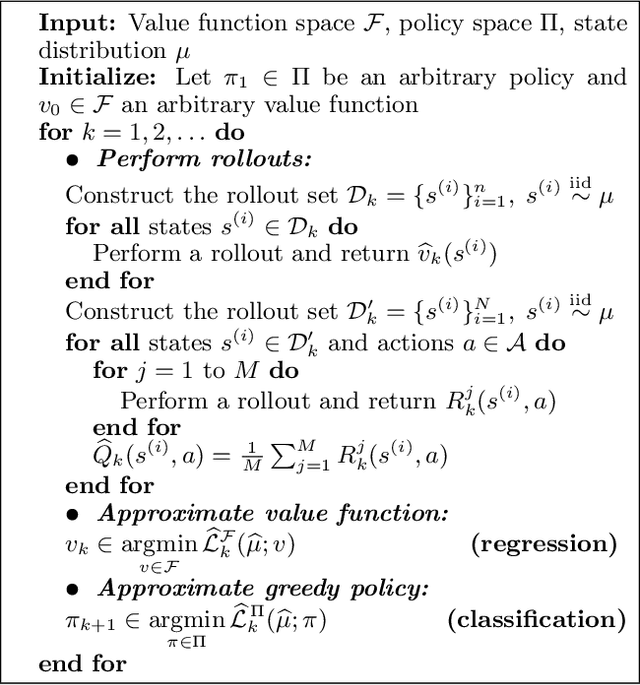
Modified policy iteration (MPI) is a dynamic programming (DP) algorithm that contains the two celebrated policy and value iteration methods. Despite its generality, MPI has not been thoroughly studied, especially its approximation form which is used when the state and/or action spaces are large or infinite. In this paper, we propose three implementations of approximate MPI (AMPI) that are extensions of well-known approximate DP algorithms: fitted-value iteration, fitted-Q iteration, and classification-based policy iteration. We provide error propagation analyses that unify those for approximate policy and value iteration. On the last classification-based implementation, we develop a finite-sample analysis that shows that MPI's main parameter allows to control the balance between the estimation error of the classifier and the overall value function approximation.