 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward RAPS: the Robot Autonomy Perception Scale
Jul 15, 2024



Human-robot interactions can change significantly depending on how autonomous humans perceive a robot to be. Yet, while previous work in the HRI community measured perceptions of human autonomy, there is little work on measuring perceptions of robot autonomy. In this paper, we present our progress toward the creation of the Robot Autonomy Perception Scale (RAPS): a theoretically motivated scale for measuring human perceptions of robot autonomy. We formulated a set of fifteen Likert scale items that are based on the definition of autonomy from Beer et al.'s work, which identifies five key autonomy components: ability to sense, ability to plan, ability to act, ability to act with an intent towards some goal, and an ability to do so without external control. We applied RAPS to an experimental context in which a robot communicated with a human teammate through different levels of Performative Autonomy (PA): an autonomy-driven strategy in which robots may "perform" a lower level of autonomy than they are truly capable of to increase human situational awareness. Our results present preliminary validation for RAPS by demonstrating its sensitivity to PA and motivate the further validation of RAPS.
Dialogue with Robots: Proposals for Broadening Participation and Research in the SLIVAR Community
Apr 01, 2024
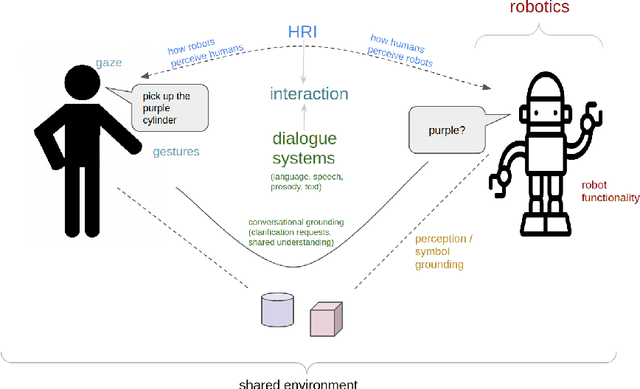
The ability to interact with machines using natural human language is becoming not just commonplace, but expected. The next step is not just text interfaces, but speech interfaces and not just with computers, but with all machines including robots. In this paper, we chronicle the recent history of this growing field of spoken dialogue with robots and offer the community three proposals, the first focused on education, the second on benchmarks, and the third on the modeling of language when it comes to spoken interaction with robots. The three proposals should act as white papers for any researcher to take and build upon.
Introduction to Human-Robot Interaction: A Multi-Perspective Introductory Course
Mar 22, 2024In this paper I describe the design of an introductory course in Human-Robot Interaction. This project-driven course is designed to introduce undergraduate and graduate engineering students, especially those enrolled in Computer Science, Mechanical Engineering, and Robotics degree programs, to key theories and methods used in the field of Human-Robot Interaction that they would otherwise be unlikely to see in those degree programs. To achieve this aim, the course takes students all the way from stakeholder analysis to empirical evaluation, covering and integrating key Qualitative, Design, Computational, and Quantitative methods along the way. I detail the goals, audience, and format of the course, and provide a detailed walkthrough of the course syllabus.
TOBY: A Tool for Exploring Data in Academic Survey Papers
Jun 13, 2023This paper describes TOBY, a visualization tool that helps a user explore the contents of an academic survey paper. The visualization consists of four components: a hierarchical view of taxonomic data in the survey, a document similarity view in the space of taxonomic classes, a network view of citations, and a new paper recommendation tool. In this paper, we will discuss these features in the context of three separate deployments of the tool.
Hidden Complexities in the Computational Modeling of Proportionality for Robotic Norm Violation Response
Oct 15, 2022Language-capable robots hold unique persuasive power over humans, and thus can help regulate people's behavior and preserve a better moral ecosystem, by rejecting unethical commands and calling out norm violations. However, miscalibrated norm violation responses (when the harshness of a response does not match the actual norm violation severity) may not only decrease the effectiveness of human-robot communication, but may also damage the rapport between humans and robots. Therefore, when robots respond to norm violations, it is crucial that they consider both the moral value of their response (by considering how much positive moral influence their response could exert) and the social value (by considering how much face threat might be imposed by their utterance). In this paper, we present a simple (naive) mathematical model of proportionality which could explain how moral and social considerations should be balanced in multi-agent norm violation response generation. But even more importantly, we use this model to start a discussion about the hidden complexity of modeling proportionality, and use this discussion to identify key research directions that must be explored in order to develop socially and morally competent language-capable robots.
* 5 pages, the AI-HRI Symposium at AAAI Fall Symposium Series (FSS) 2022
Mixed-Reality Robot Behavior Replay: A System Implementation
Sep 30, 2022


As robots become increasingly complex, they must explain their behaviors to gain trust and acceptance. However, it may be difficult through verbal explanation alone to fully convey information about past behavior, especially regarding objects no longer present due to robots' or humans' actions. Humans often try to physically mimic past movements to accompany verbal explanations. Inspired by this human-human interaction, we describe the technical implementation of a system for past behavior replay for robots in this tool paper. Specifically, we used Behavior Trees to encode and separate robot behaviors, and schemaless MongoDB to structurally store and query the underlying sensor data and joint control messages for future replay. Our approach generalizes to different types of replays, including both manipulation and navigation replay, and visual (i.e., augmented reality (AR)) and auditory replay. Additionally, we briefly summarize a user study to further provide empirical evidence of its effectiveness and efficiency. Sample code and instructions are available on GitHub at https://github.com/umhan35/robot-behavior-replay.
* 6 pages, 5 figures, the AI-HRI Symposium at AAAI Fall Symposium Series (FSS) 2022
Causal Robot Communication Inspired by Observational Learning Insights
Mar 17, 2022Autonomous robots must communicate about their decisions to gain trust and acceptance. When doing so, robots must determine which actions are causal, i.e., which directly give rise to the desired outcome, so that these actions can be included in explanations. In behavior learning in psychology, this sort of reasoning during an action sequence has been studied extensively in the context of imitation learning. And yet, these techniques and empirical insights are rarely applied to human-robot interaction (HRI). In this work, we discuss the relevance of behavior learning insights for robot intent communication, and present the first application of these insights for a robot to efficiently communicate its intent by selectively explaining the causal actions in an action sequence.
Towards Formalizing HRI Data Collection Processes
Mar 16, 2022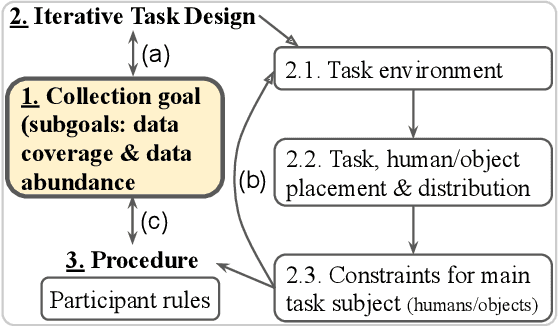
Within the human-robot interaction (HRI) community, many researchers have focused on the careful design of human-subjects studies. However, other parts of the community, e.g., the technical advances community, also need to do human-subjects studies to collect data to train their models, in ways that require user studies but without a strict experimental design. The design of such data collection is an underexplored area worthy of more attention. In this work, we contribute a clearly defined process to collect data with three steps for machine learning modeling purposes, grounded in recent literature, and detail an use of this process to facilitate the collection of a corpus of referring expressions. Specifically, we discuss our data collection goal and how we worked to encourage well-covered and abundant participant responses, through our design of the task environment, the task itself, and the study procedure. We hope this work would lead to more data collection formalism efforts in the HRI community and a fruitful discussion during the workshop.
Virtual, Augmented, and Mixed Reality for Human-Robot Interaction: A Survey and Virtual Design Element Taxonomy
Feb 23, 2022
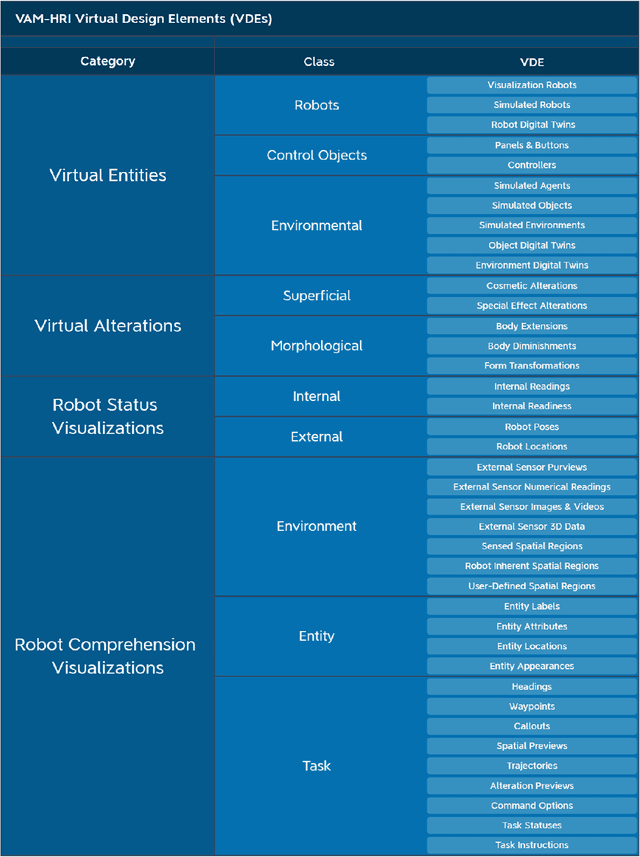
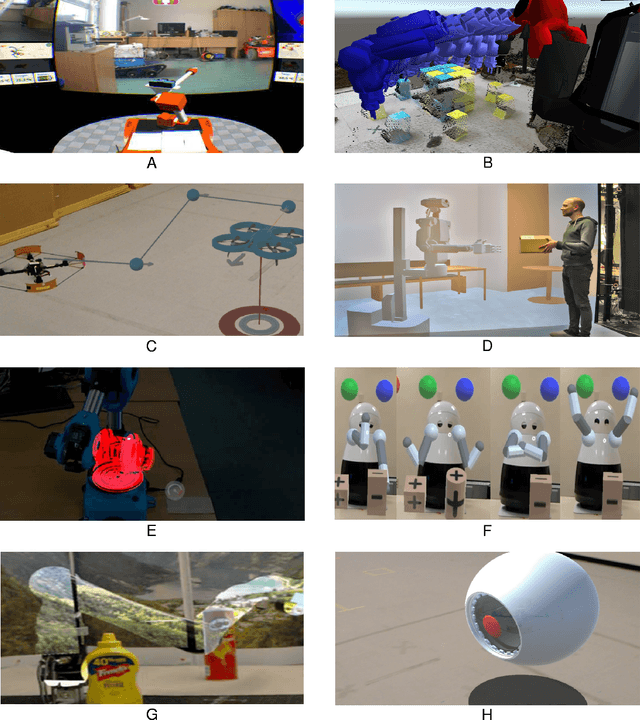
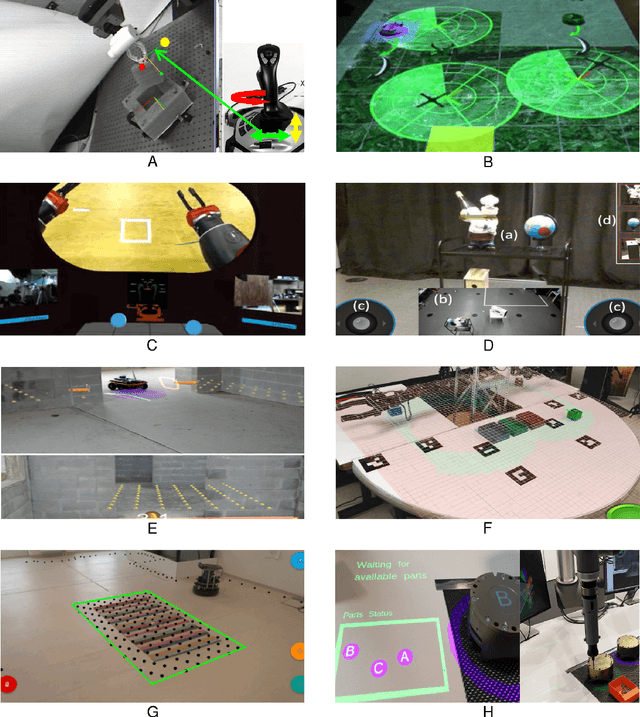
Virtual, Augmented, and Mixed Reality for Human-Robot Interaction (VAM-HRI) has been gaining considerable attention in research in recent years. However, the HRI community lacks a set of shared terminology and framework for characterizing aspects of mixed reality interfaces, presenting serious problems for future research. Therefore, it is important to have a common set of terms and concepts that can be used to precisely describe and organize the diverse array of work being done within the field. In this paper, we present a novel taxonomic framework for different types of VAM-HRI interfaces, composed of four main categories of virtual design elements (VDEs). We present and justify our taxonomy and explain how its elements have been developed over the last 30 years as well as the current directions VAM-HRI is headed in the coming decade.
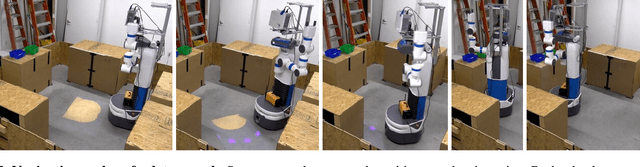
Projecting Robot Navigation Paths: Hardware and Software for Projected AR
Jan 06, 2022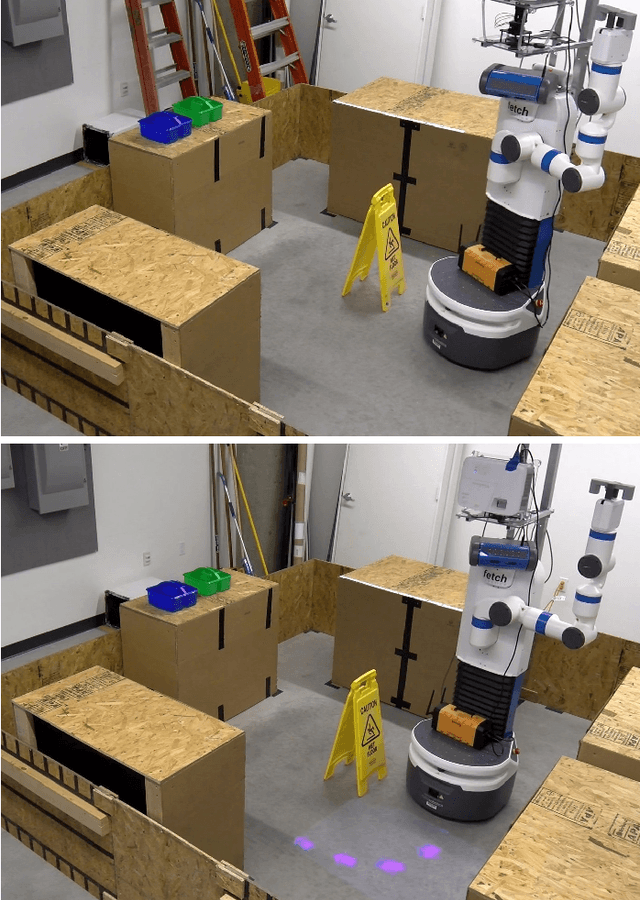
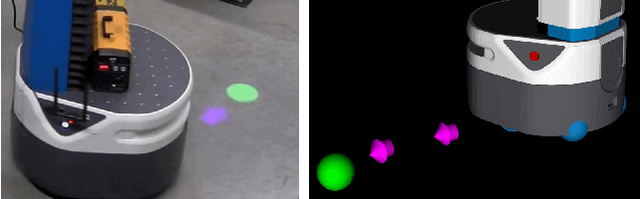
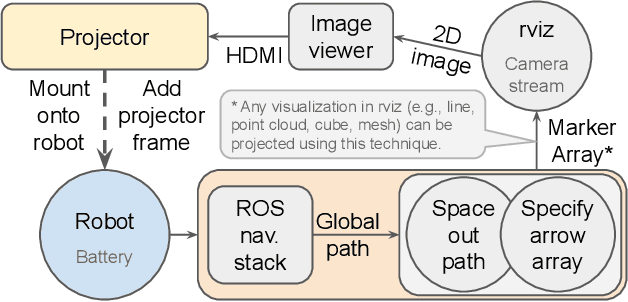
For mobile robots, mobile manipulators, and autonomous vehicles to safely navigate around populous places such as streets and warehouses, human observers must be able to understand their navigation intent. One way to enable such understanding is by visualizing this intent through projections onto the surrounding environment. But despite the demonstrated effectiveness of such projections, no open codebase with an integrated hardware setup exists. In this work, we detail the empirical evidence for the effectiveness of such directional projections, and share a robot-agnostic implementation of such projections, coded in C++ using the widely-used Robot Operating System (ROS) and rviz. Additionally, we demonstrate a hardware configuration for deploying this software, using a Fetch robot, and briefly summarize a full-scale user study that motivates this configuration. The code, configuration files (roslaunch and rviz files), and documentation are freely available on GitHub at https://github.com/umhan35/arrow_projection.