 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProjecting Robot Navigation Paths: Hardware and Software for Projected AR
Paper and Code
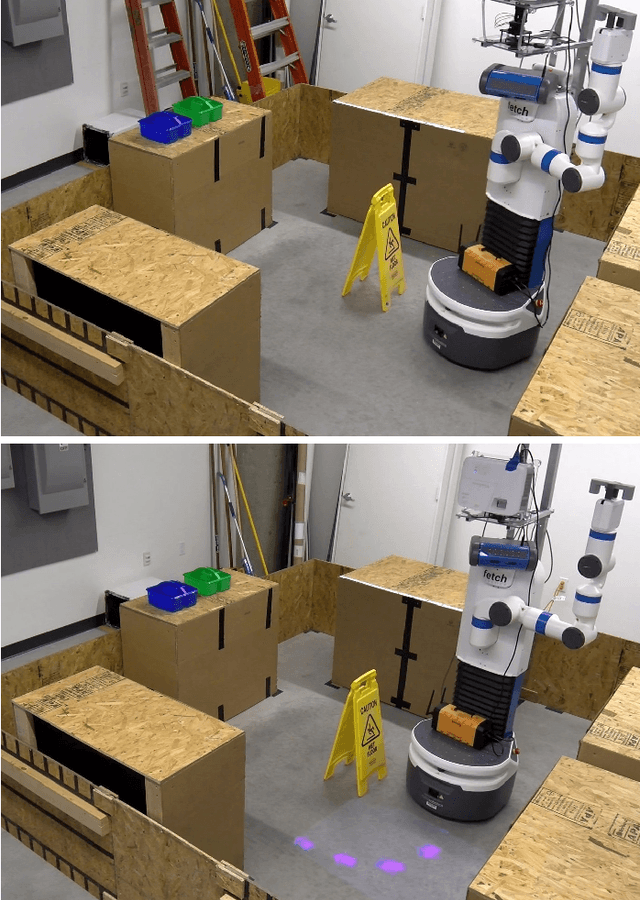
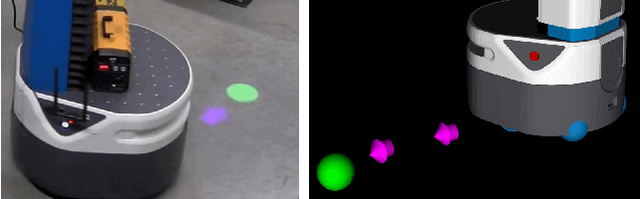
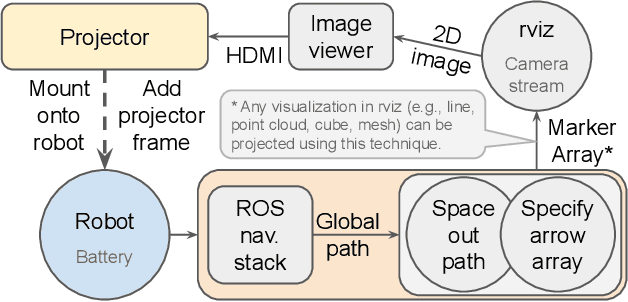
For mobile robots, mobile manipulators, and autonomous vehicles to safely navigate around populous places such as streets and warehouses, human observers must be able to understand their navigation intent. One way to enable such understanding is by visualizing this intent through projections onto the surrounding environment. But despite the demonstrated effectiveness of such projections, no open codebase with an integrated hardware setup exists. In this work, we detail the empirical evidence for the effectiveness of such directional projections, and share a robot-agnostic implementation of such projections, coded in C++ using the widely-used Robot Operating System (ROS) and rviz. Additionally, we demonstrate a hardware configuration for deploying this software, using a Fetch robot, and briefly summarize a full-scale user study that motivates this configuration. The code, configuration files (roslaunch and rviz files), and documentation are freely available on GitHub at https://github.com/umhan35/arrow_projection.