 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProjecting Robot Navigation Paths: Hardware and Software for Projected AR
Jan 06, 2022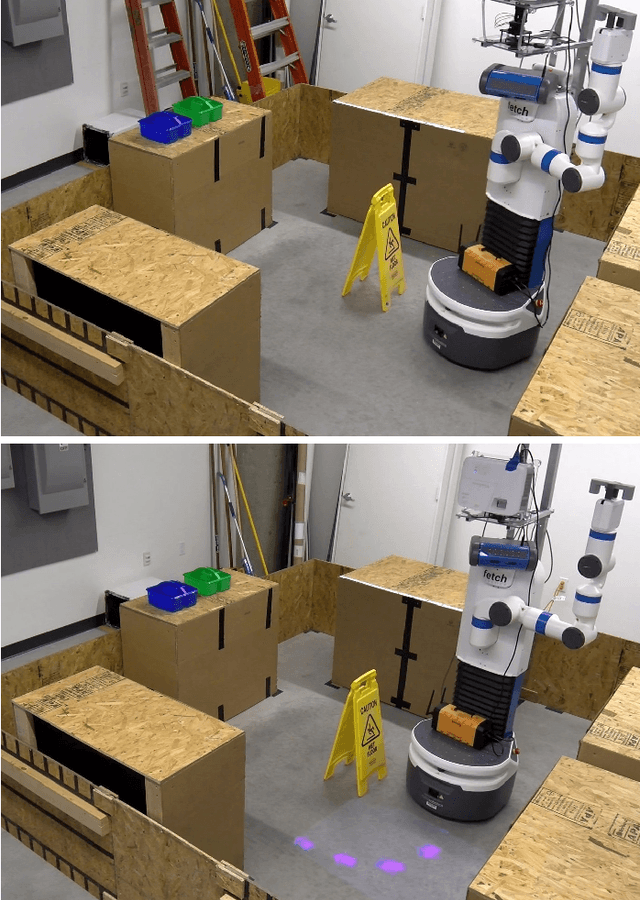
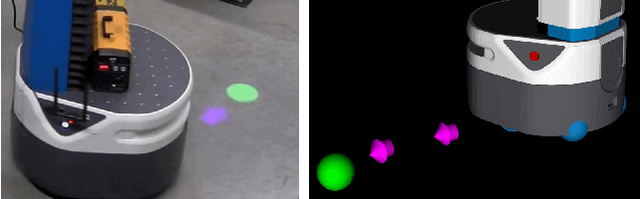
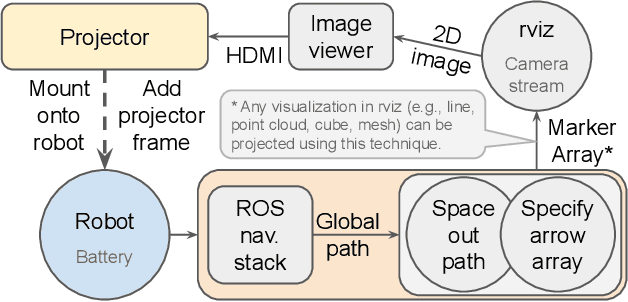
For mobile robots, mobile manipulators, and autonomous vehicles to safely navigate around populous places such as streets and warehouses, human observers must be able to understand their navigation intent. One way to enable such understanding is by visualizing this intent through projections onto the surrounding environment. But despite the demonstrated effectiveness of such projections, no open codebase with an integrated hardware setup exists. In this work, we detail the empirical evidence for the effectiveness of such directional projections, and share a robot-agnostic implementation of such projections, coded in C++ using the widely-used Robot Operating System (ROS) and rviz. Additionally, we demonstrate a hardware configuration for deploying this software, using a Fetch robot, and briefly summarize a full-scale user study that motivates this configuration. The code, configuration files (roslaunch and rviz files), and documentation are freely available on GitHub at https://github.com/umhan35/arrow_projection.
Projection Mapping Implementation: Enabling Direct Externalization of Perception Results and Action Intent to Improve Robot Explainability
Oct 05, 2020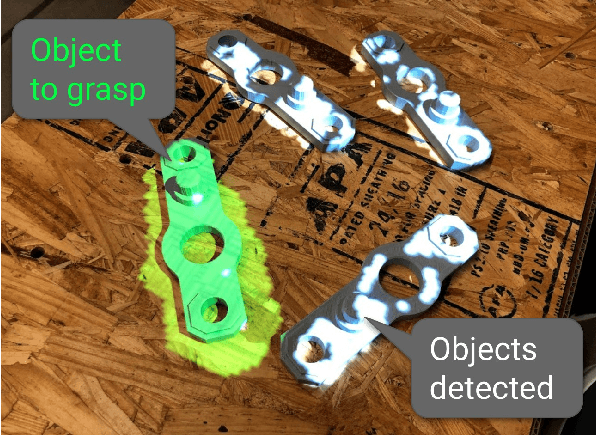
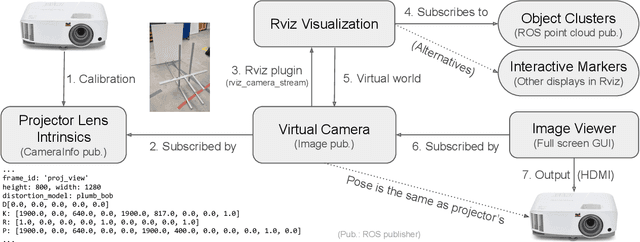
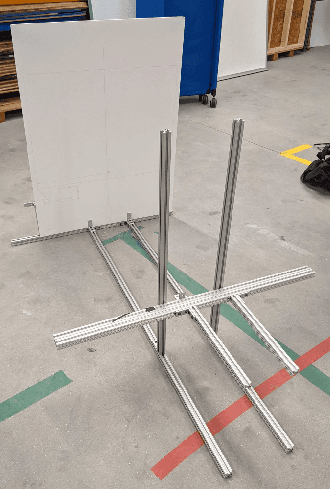

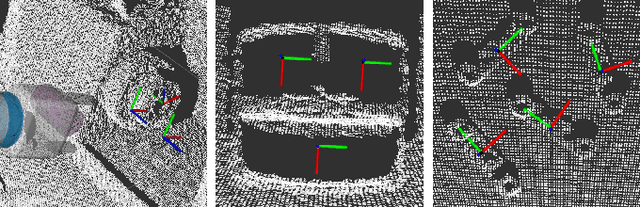
Existing research on non-verbal cues, e.g., eye gaze or arm movement, may not accurately present a robot's internal states such as perception results and action intent. Projecting the states directly onto a robot's operating environment has the advantages of being direct, accurate, and more salient, eliminating mental inference about the robot's intention. However, there is a lack of tools for projection mapping in robotics, compared to established motion planning libraries (e.g., MoveIt). In this paper, we detail the implementation of projection mapping to enable researchers and practitioners to push the boundaries for better interaction between robots and humans. We also provide practical documentation and code for a sample manipulation projection mapping on GitHub: github.com/uml-robotics/projection_mapping.
Towards Mobile Multi-Task Manipulation in a Confined and Integrated Environment with Irregular Objects
Mar 03, 2020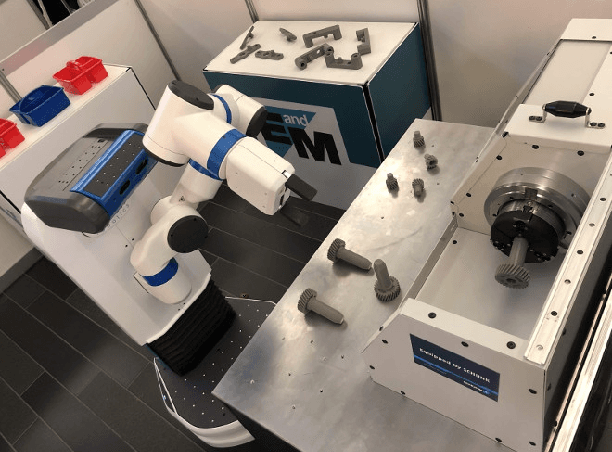

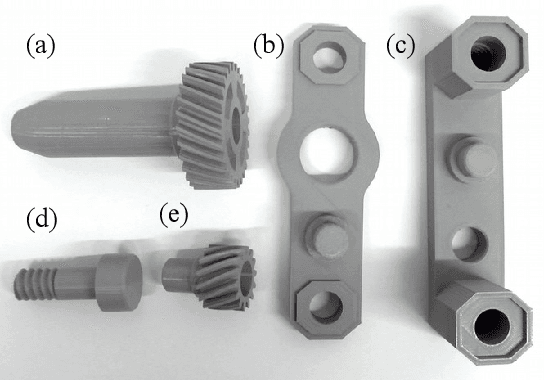
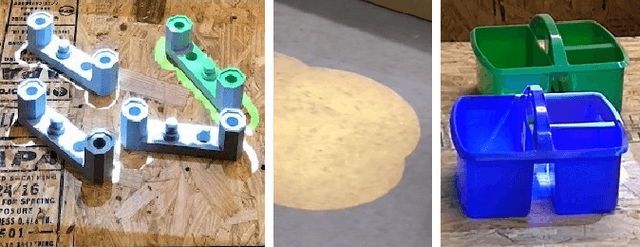
The FetchIt! Mobile Manipulation Challenge, held at the IEEE International Conference on Robots and Automation (ICRA) in May 2019, offered an environment with complex and integrated task sets, irregular objects, confined space, and machining, introducing new challenges in the mobile manipulation domain. Here we describe our efforts to address these challenges by demonstrating the assembly of a kit of mechanical parts in a caddy. In addition to implementation details, we examine the issues in this task set extensively, and we discuss our software architecture in the hope of providing a base for other researchers. To evaluate performance and consistency, we conducted 20 full runs, then examined failure cases with possible solutions. We conclude by identifying future research directions to address the open challenges.