 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Mobile Multi-Task Manipulation in a Confined and Integrated Environment with Irregular Objects
Mar 03, 2020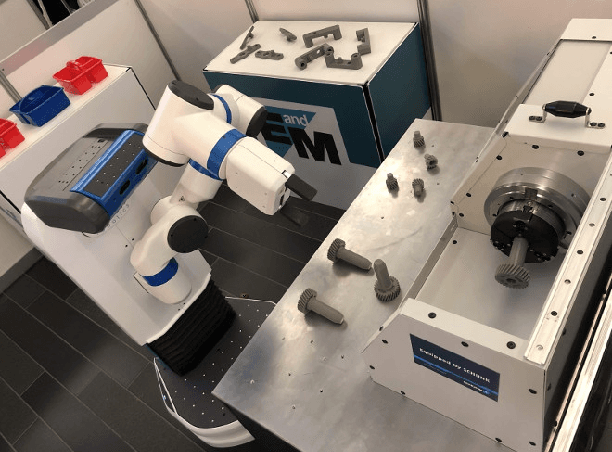

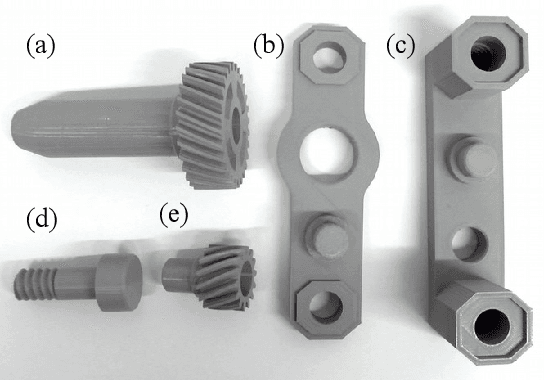
The FetchIt! Mobile Manipulation Challenge, held at the IEEE International Conference on Robots and Automation (ICRA) in May 2019, offered an environment with complex and integrated task sets, irregular objects, confined space, and machining, introducing new challenges in the mobile manipulation domain. Here we describe our efforts to address these challenges by demonstrating the assembly of a kit of mechanical parts in a caddy. In addition to implementation details, we examine the issues in this task set extensively, and we discuss our software architecture in the hope of providing a base for other researchers. To evaluate performance and consistency, we conducted 20 full runs, then examined failure cases with possible solutions. We conclude by identifying future research directions to address the open challenges.