 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Planning, scheduling, and execution on the Moon: the CADRE technology demonstration mission
Feb 20, 2025NASA's Cooperative Autonomous Distributed Robotic Exploration (CADRE) mission, slated for flight to the Moon's Reiner Gamma region in 2025/2026, is designed to demonstrate multi-agent autonomous exploration of the Lunar surface and sub-surface. A team of three robots and a base station will autonomously explore a region near the lander, collecting the data required for 3D reconstruction of the surface with no human input; and then autonomously perform distributed sensing with multi-static ground penetrating radars (GPR), driving in formation while performing coordinated radar soundings to create a map of the subsurface. At the core of CADRE's software architecture is a novel autonomous, distributed planning, scheduling, and execution (PS&E) system. The system coordinates the robots' activities, planning and executing tasks that require multiple robots' participation while ensuring that each individual robot's thermal and power resources stay within prescribed bounds, and respecting ground-prescribed sleep-wake cycles. The system uses a centralized-planning, distributed-execution paradigm, and a leader election mechanism ensures robustness to failures of individual agents. In this paper, we describe the architecture of CADRE's PS&E system; discuss its design rationale; and report on verification and validation (V&V) testing of the system on CADRE's hardware in preparation for deployment on the Moon.
ACHORD: Communication-Aware Multi-Robot Coordination with Intermittent Connectivity
Jun 05, 2022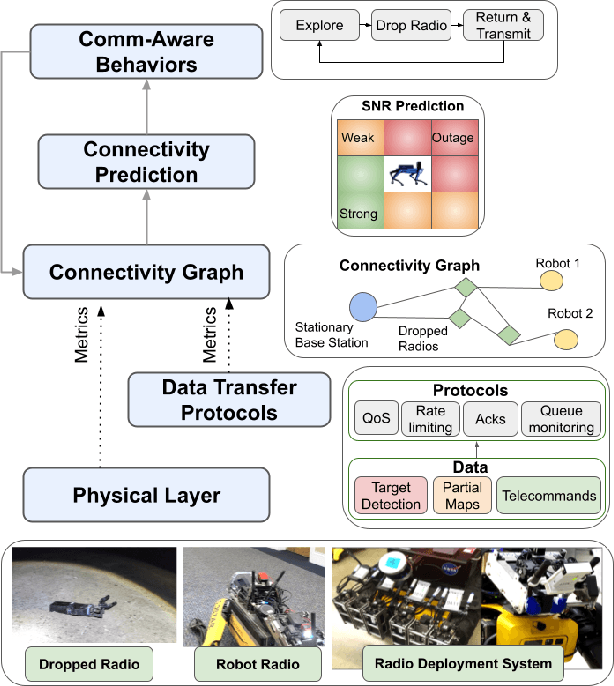
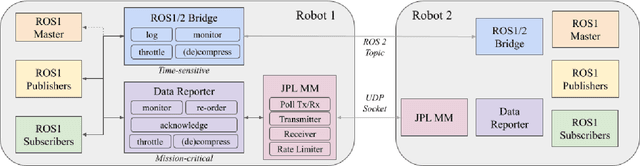
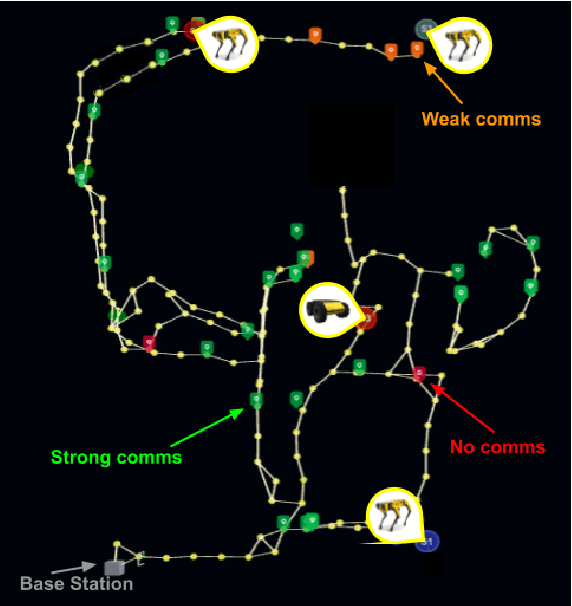
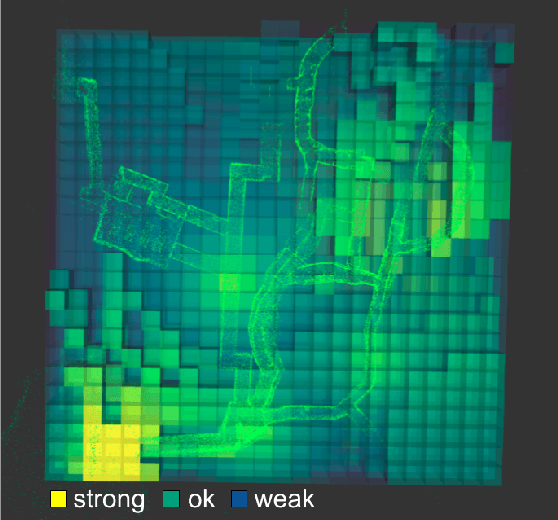
Communication is an important capability for multi-robot exploration because (1) inter-robot communication (comms) improves coverage efficiency and (2) robot-to-base comms improves situational awareness. Exploring comms-restricted (e.g., subterranean) environments requires a multi-robot system to tolerate and anticipate intermittent connectivity, and to carefully consider comms requirements, otherwise mission-critical data may be lost. In this paper, we describe and analyze ACHORD (Autonomous & Collaborative High-Bandwidth Operations with Radio Droppables), a multi-layer networking solution which tightly co-designs the network architecture and high-level decision-making for improved comms. ACHORD provides bandwidth prioritization and timely and reliable data transfer despite intermittent connectivity. Furthermore, it exposes low-layer networking metrics to the application layer to enable robots to autonomously monitor, map, and extend the network via droppable radios, as well as restore connectivity to improve collaborative exploration. We evaluate our solution with respect to the comms performance in several challenging underground environments including the DARPA SubT Finals competition environment. Our findings support the use of data stratification and flow control to improve bandwidth-usage.
PropEM-L: Radio Propagation Environment Modeling and Learning for Communication-Aware Multi-Robot Exploration
May 03, 2022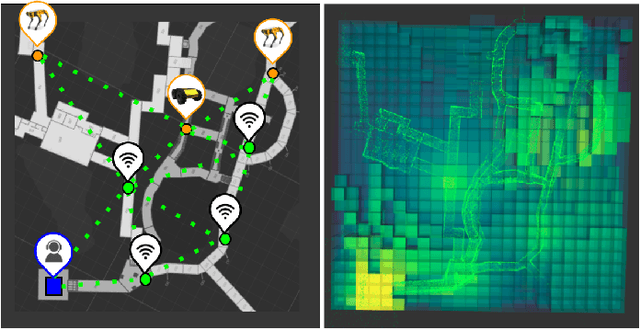


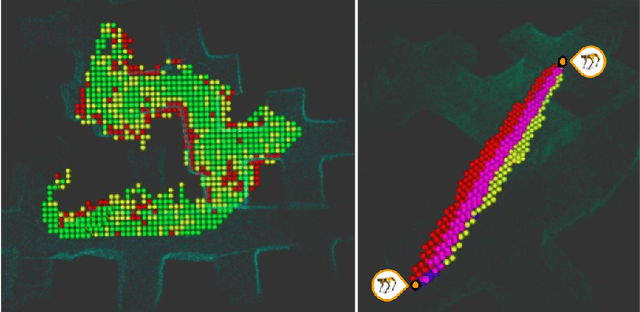
Multi-robot exploration of complex, unknown environments benefits from the collaboration and cooperation offered by inter-robot communication. Accurate radio signal strength prediction enables communication-aware exploration. Models which ignore the effect of the environment on signal propagation or rely on a priori maps suffer in unknown, communication-restricted (e.g. subterranean) environments. In this work, we present Propagation Environment Modeling and Learning (PropEM-L), a framework which leverages real-time sensor-derived 3D geometric representations of an environment to extract information about line of sight between radios and attenuating walls/obstacles in order to accurately predict received signal strength (RSS). Our data-driven approach combines the strengths of well-known models of signal propagation phenomena (e.g. shadowing, reflection, diffraction) and machine learning, and can adapt online to new environments. We demonstrate the performance of PropEM-L on a six-robot team in a communication-restricted environment with subway-like, mine-like, and cave-like characteristics, constructed for the 2021 DARPA Subterranean Challenge. Our findings indicate that PropEM-L can improve signal strength prediction accuracy by up to 44% over a log-distance path loss model.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021
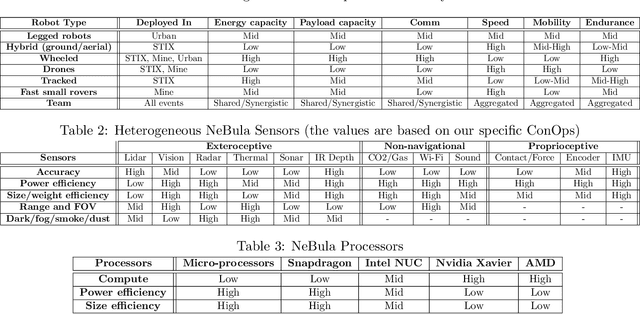
This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
The Pluggable Distributed Resource Allocator (PDRA): a Middleware for Distributed Computing in Mobile Robotic Networks
Mar 30, 2020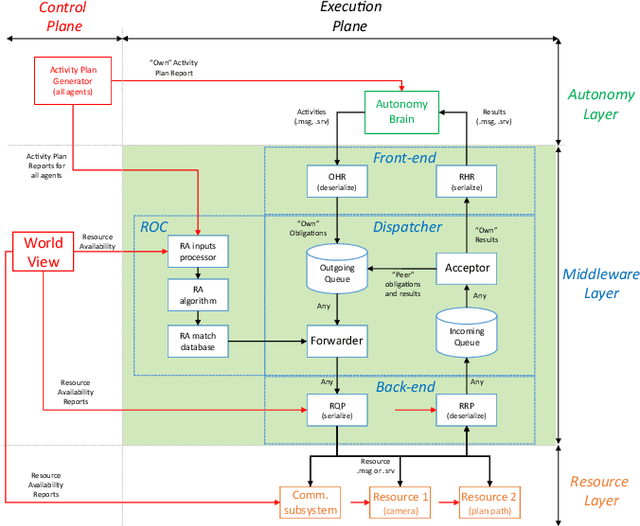
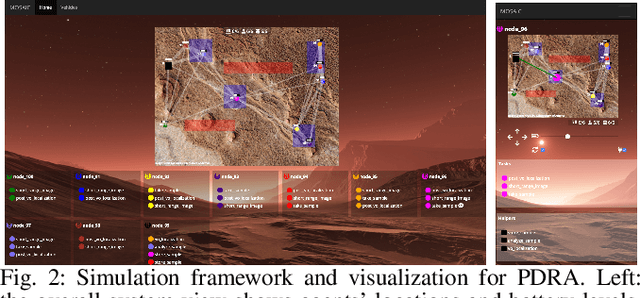
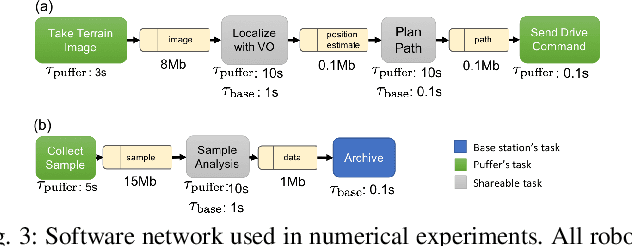
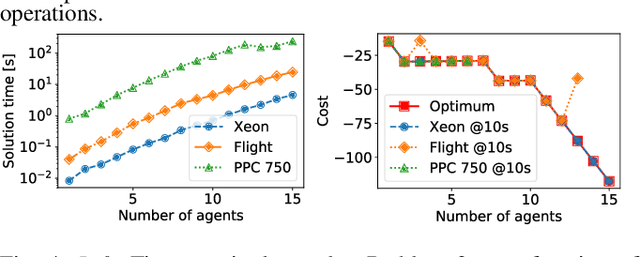
We present the Pluggable Distributed Resource Allocator (PDRA), a middleware for distributed computing in heterogeneous mobile robotic networks. PDRA enables autonomous agents to share computational resources for computationally expensive tasks such as localization and path planning. It sits between an existing single-agent planner/executor and existing computational resources (e.g. ROS packages), intercepts the executor's requests and, if needed, transparently routes them to other nodes for execution. PDRA is pluggable: it can be integrated in an existing single-robot autonomy stack with minimal modifications. Task allocation decisions are performed by a mixed-integer programming algorithm, solved in a shared-world fashion, that models CPU resources, network bandwidth, and latency requirements, and minimizes overall energy usage or maximizes reward for completing optional tasks. Simulation results show that PDRA can reduce energy and CPU usage by over 50% in representative multi-robot scenarios compared to a naive scheduler; runs on embedded platforms; and performs well in delay- and disruption-tolerant networks (DTNs). PDRA is available to the community under an open-source license.