 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Pluggable Distributed Resource Allocator (PDRA): a Middleware for Distributed Computing in Mobile Robotic Networks
Paper and Code
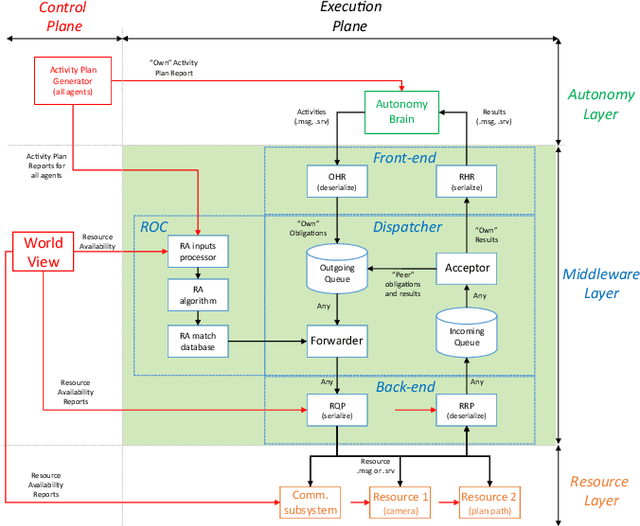
We present the Pluggable Distributed Resource Allocator (PDRA), a middleware for distributed computing in heterogeneous mobile robotic networks. PDRA enables autonomous agents to share computational resources for computationally expensive tasks such as localization and path planning. It sits between an existing single-agent planner/executor and existing computational resources (e.g. ROS packages), intercepts the executor's requests and, if needed, transparently routes them to other nodes for execution. PDRA is pluggable: it can be integrated in an existing single-robot autonomy stack with minimal modifications. Task allocation decisions are performed by a mixed-integer programming algorithm, solved in a shared-world fashion, that models CPU resources, network bandwidth, and latency requirements, and minimizes overall energy usage or maximizes reward for completing optional tasks. Simulation results show that PDRA can reduce energy and CPU usage by over 50% in representative multi-robot scenarios compared to a naive scheduler; runs on embedded platforms; and performs well in delay- and disruption-tolerant networks (DTNs). PDRA is available to the community under an open-source license.