 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Decentralized Routing Policies via Graph Attention-based Multi-Agent Reinforcement Learning in Lunar Delay-Tolerant Networks
Oct 23, 2025We present a fully decentralized routing framework for multi-robot exploration missions operating under the constraints of a Lunar Delay-Tolerant Network (LDTN). In this setting, autonomous rovers must relay collected data to a lander under intermittent connectivity and unknown mobility patterns. We formulate the problem as a Partially Observable Markov Decision Problem (POMDP) and propose a Graph Attention-based Multi-Agent Reinforcement Learning (GAT-MARL) policy that performs Centralized Training, Decentralized Execution (CTDE). Our method relies only on local observations and does not require global topology updates or packet replication, unlike classical approaches such as shortest path and controlled flooding-based algorithms. Through Monte Carlo simulations in randomized exploration environments, GAT-MARL provides higher delivery rates, no duplications, and fewer packet losses, and is able to leverage short-term mobility forecasts; offering a scalable solution for future space robotic systems for planetary exploration, as demonstrated by successful generalization to larger rover teams.
PropEM-L: Radio Propagation Environment Modeling and Learning for Communication-Aware Multi-Robot Exploration
May 03, 2022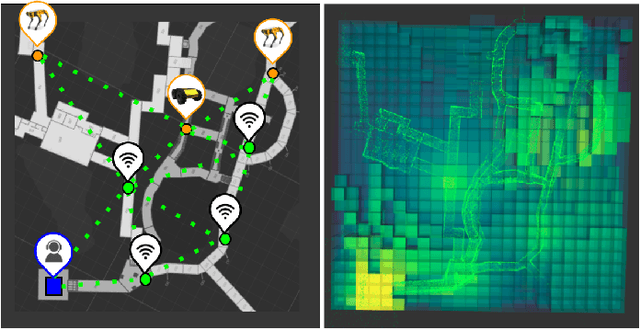


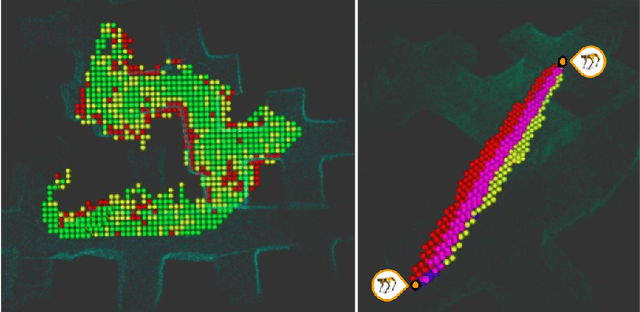
Multi-robot exploration of complex, unknown environments benefits from the collaboration and cooperation offered by inter-robot communication. Accurate radio signal strength prediction enables communication-aware exploration. Models which ignore the effect of the environment on signal propagation or rely on a priori maps suffer in unknown, communication-restricted (e.g. subterranean) environments. In this work, we present Propagation Environment Modeling and Learning (PropEM-L), a framework which leverages real-time sensor-derived 3D geometric representations of an environment to extract information about line of sight between radios and attenuating walls/obstacles in order to accurately predict received signal strength (RSS). Our data-driven approach combines the strengths of well-known models of signal propagation phenomena (e.g. shadowing, reflection, diffraction) and machine learning, and can adapt online to new environments. We demonstrate the performance of PropEM-L on a six-robot team in a communication-restricted environment with subway-like, mine-like, and cave-like characteristics, constructed for the 2021 DARPA Subterranean Challenge. Our findings indicate that PropEM-L can improve signal strength prediction accuracy by up to 44% over a log-distance path loss model.
Multi-Robot On-site Shared Analytics Information and Computing
Dec 13, 2021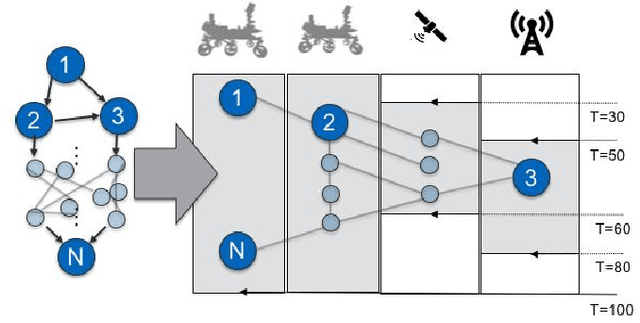
Computation load-sharing across a network of heterogeneous robots is a promising approach to increase robots capabilities and efficiency as a team in extreme environments. However, in such environments, communication links may be intermittent and connections to the cloud or internet may be nonexistent. In this paper we introduce a communication-aware, computation task scheduling problem for multi-robot systems and propose an integer linear program (ILP) that optimizes the allocation of computational tasks across a network of heterogeneous robots, accounting for the networked robots' computational capabilities and for available (and possibly time-varying) communication links. We consider scheduling of a set of inter-dependent required and optional tasks modeled by a dependency graph. We present a consensus-backed scheduling architecture for shared-world, distributed systems. We validate the ILP formulation and the distributed implementation in different computation platforms and in simulated scenarios with a bias towards lunar or planetary exploration scenarios. Our results show that the proposed implementation can optimize schedules to allow a threefold increase the amount of rewarding tasks performed (e.g., science measurements) compared to an analogous system with no computational load-sharing.
The Pluggable Distributed Resource Allocator (PDRA): a Middleware for Distributed Computing in Mobile Robotic Networks
Mar 30, 2020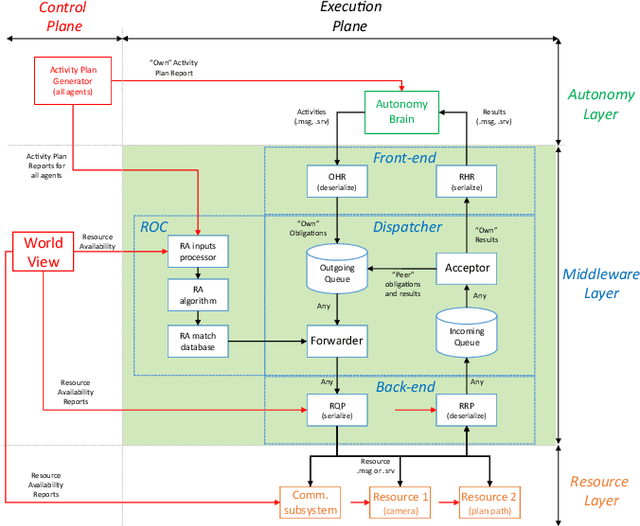
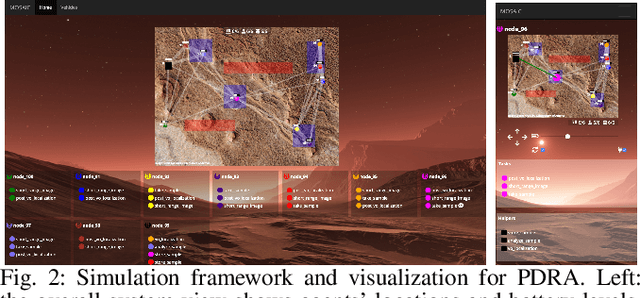
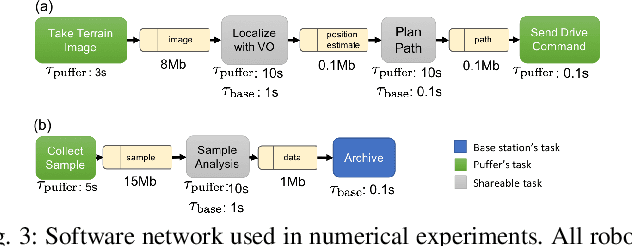
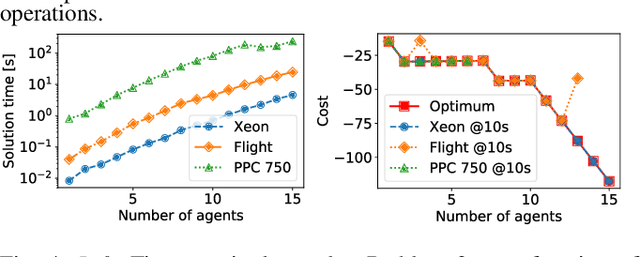
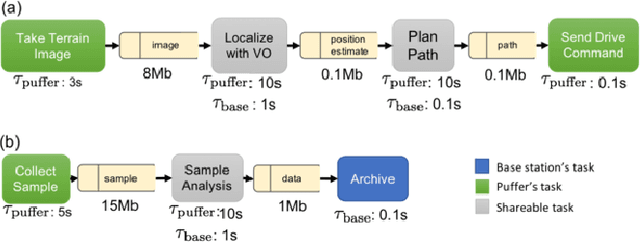
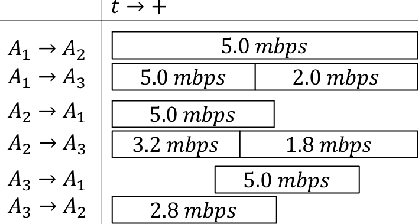
We present the Pluggable Distributed Resource Allocator (PDRA), a middleware for distributed computing in heterogeneous mobile robotic networks. PDRA enables autonomous agents to share computational resources for computationally expensive tasks such as localization and path planning. It sits between an existing single-agent planner/executor and existing computational resources (e.g. ROS packages), intercepts the executor's requests and, if needed, transparently routes them to other nodes for execution. PDRA is pluggable: it can be integrated in an existing single-robot autonomy stack with minimal modifications. Task allocation decisions are performed by a mixed-integer programming algorithm, solved in a shared-world fashion, that models CPU resources, network bandwidth, and latency requirements, and minimizes overall energy usage or maximizes reward for completing optional tasks. Simulation results show that PDRA can reduce energy and CPU usage by over 50% in representative multi-robot scenarios compared to a naive scheduler; runs on embedded platforms; and performs well in delay- and disruption-tolerant networks (DTNs). PDRA is available to the community under an open-source license.