 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling Astronaut Self-Scheduling using a Robust Advanced Modelling and Scheduling system: an assessment during a Mars analogue mission
Jan 14, 2023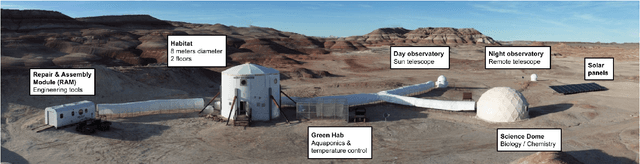

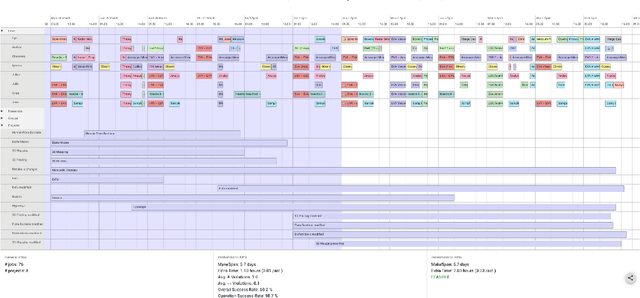
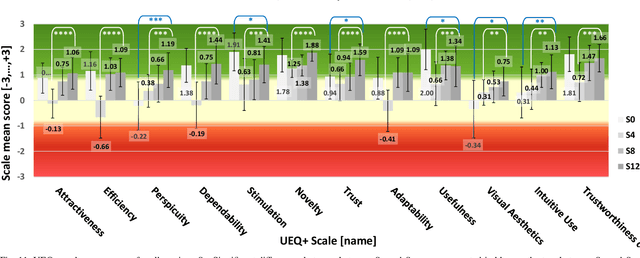
Human long duration exploration missions (LDEMs) raise a number of technological challenges. This paper addresses the question of the crew autonomy: as the distances increase, the communication delays and constraints tend to prevent the astronauts from being monitored and supported by a real time ground control. Eventually, future planetary missions will necessarily require a form of astronaut self-scheduling. We study the usage of a computer decision-support tool by a crew of analog astronauts, during a Mars simulation mission conducted at the Mars Desert Research Station (MDRS, Mars Society) in Utah. The proposed tool, called Romie, belongs to the new category of Robust Advanced Modelling and Scheduling (RAMS) systems. It allows the crew members (i) to visually model their scientific objectives and constraints, (ii) to compute near-optimal operational schedules while taking uncertainty into account, (iii) to monitor the execution of past and current activities, and (iv) to modify scientific objectives/constraints w.r.t. unforeseen events and opportunistic science. In this study, we empirically measure how the astronauts, who are novice planners, perform at using such a tool when self-scheduling under the realistic assumptions of a simulated Martian planetary habitat.
Multi-Robot On-site Shared Analytics Information and Computing
Dec 13, 2021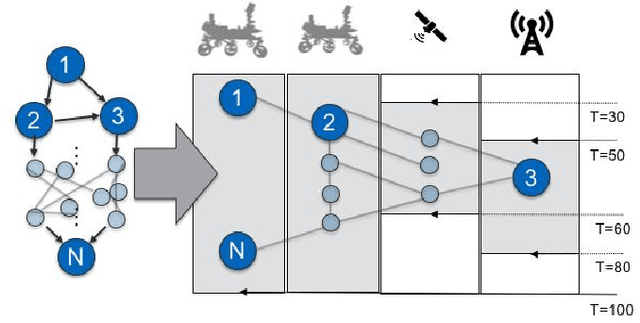
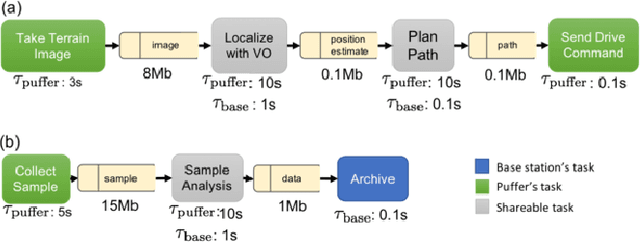
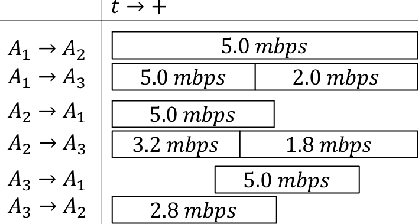
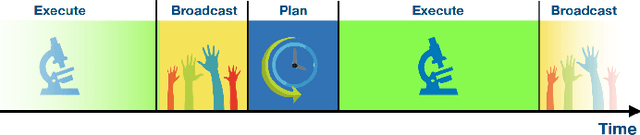
Computation load-sharing across a network of heterogeneous robots is a promising approach to increase robots capabilities and efficiency as a team in extreme environments. However, in such environments, communication links may be intermittent and connections to the cloud or internet may be nonexistent. In this paper we introduce a communication-aware, computation task scheduling problem for multi-robot systems and propose an integer linear program (ILP) that optimizes the allocation of computational tasks across a network of heterogeneous robots, accounting for the networked robots' computational capabilities and for available (and possibly time-varying) communication links. We consider scheduling of a set of inter-dependent required and optional tasks modeled by a dependency graph. We present a consensus-backed scheduling architecture for shared-world, distributed systems. We validate the ILP formulation and the distributed implementation in different computation platforms and in simulated scenarios with a bias towards lunar or planetary exploration scenarios. Our results show that the proposed implementation can optimize schedules to allow a threefold increase the amount of rewarding tasks performed (e.g., science measurements) compared to an analogous system with no computational load-sharing.
Operations for Autonomous Spacecraft
Nov 22, 2021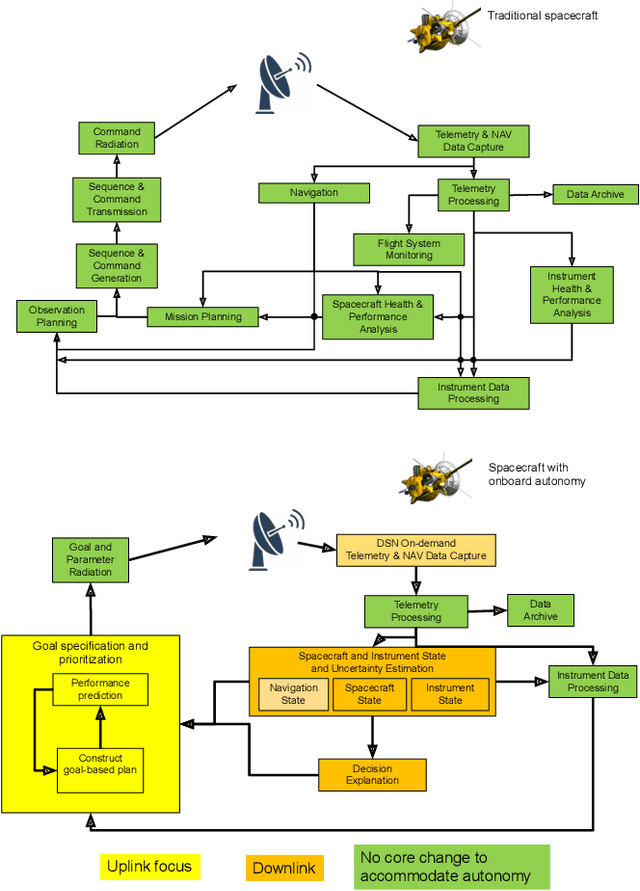
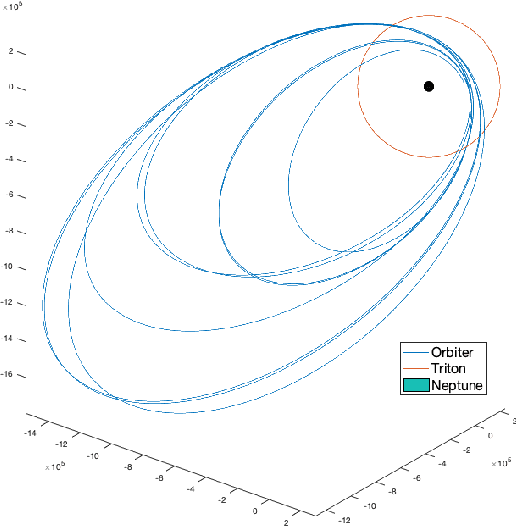
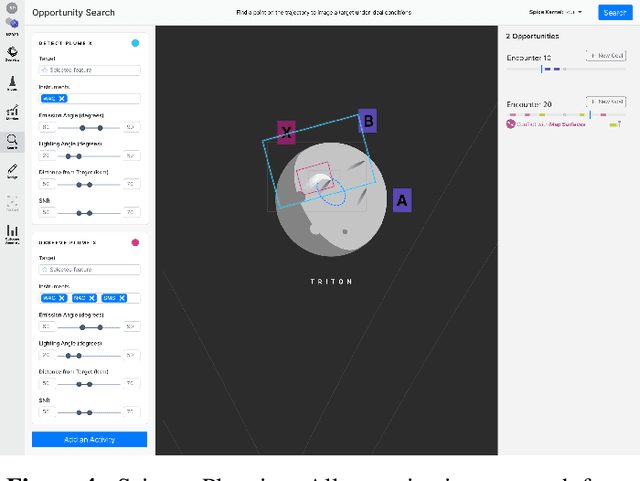
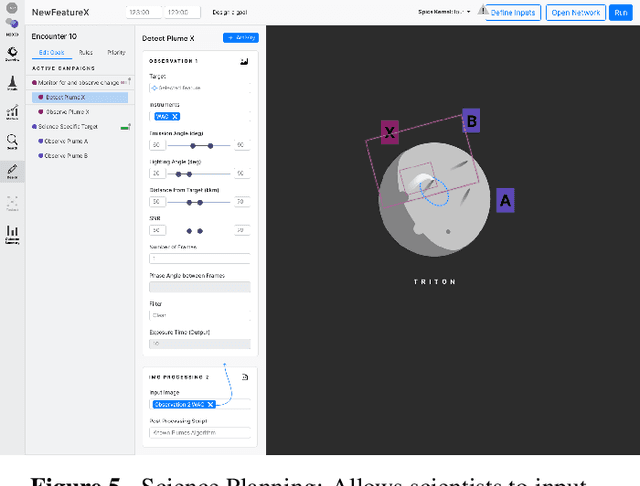
Onboard autonomy technologies such as planning and scheduling, identification of scientific targets, and content-based data summarization, will lead to exciting new space science missions. However, the challenge of operating missions with such onboard autonomous capabilities has not been studied to a level of detail sufficient for consideration in mission concepts. These autonomy capabilities will require changes to current operations processes, practices, and tools. We have developed a case study to assess the changes needed to enable operators and scientists to operate an autonomous spacecraft by facilitating a common model between the ground personnel and the onboard algorithms. We assess the new operations tools and workflows necessary to enable operators and scientists to convey their desired intent to the spacecraft, and to be able to reconstruct and explain the decisions made onboard and the state of the spacecraft. Mock-ups of these tools were used in a user study to understand the effectiveness of the processes and tools in enabling a shared framework of understanding, and in the ability of the operators and scientists to effectively achieve mission science objectives.