 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Guidance of Buoyancy Controlled Vehicles under Ice Shelves using Ocean Currents
Jun 10, 2024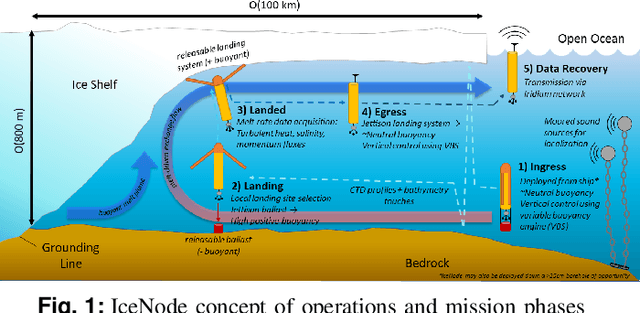

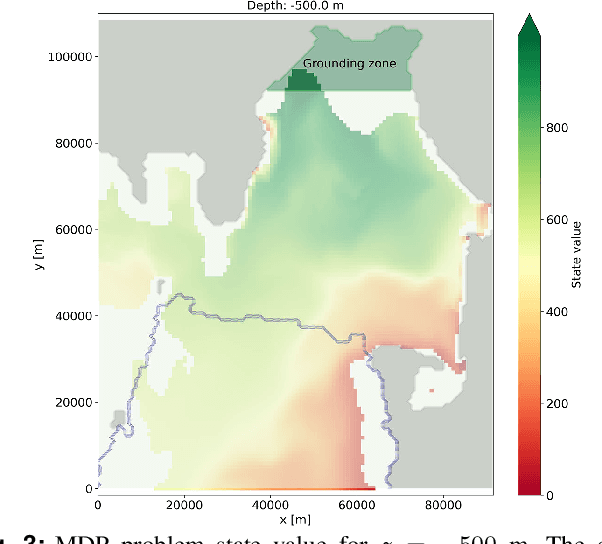
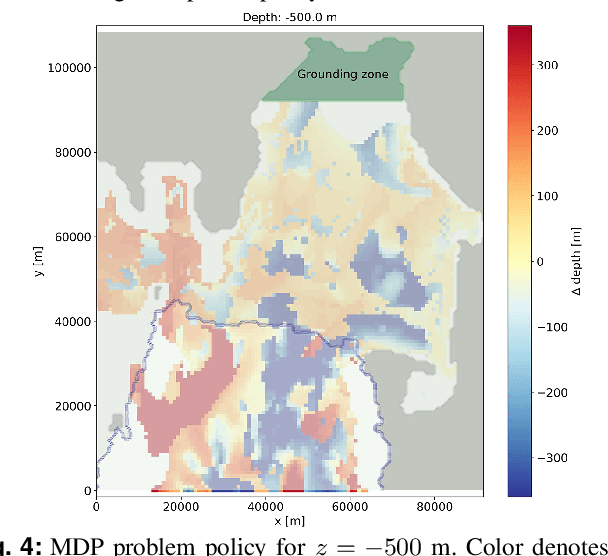
We propose a novel technique for guidance of buoyancy-controlled vehicles in uncertain under-ice ocean flows. In-situ melt rate measurements collected at the grounding zone of Antarctic ice shelves, where the ice shelf meets the underlying bedrock, are essential to constrain models of future sea level rise. Buoyancy-controlled vehicles, which control their vertical position in the water column through internal actuation but have no means of horizontal propulsion, offer an affordable and reliable platform for such in-situ data collection. However, reaching the grounding zone requires vehicles to traverse tens of kilometers under the ice shelf, with approximate position knowledge and no means of communication, in highly variable and uncertain ocean currents. To address this challenge, we propose a partially observable MDP approach that exploits model-based knowledge of the under-ice currents and, critically, of their uncertainty, to synthesize effective guidance policies. The approach uses approximate dynamic programming to model uncertainty in the currents, and QMDP to address localization uncertainty. Numerical experiments show that the policy can deliver up to 88.8% of underwater vehicles to the grounding zone -- a 33% improvement compared to state-of-the-art guidance techniques, and a 262% improvement over uncontrolled drifters. Collectively, these results show that model-based under-ice guidance is a highly promising technique for exploration of under-ice cavities, and has the potential to enable cost-effective and scalable access to these challenging and rarely observed environments.
Proximal Exploration of Venus Volcanism with Teams of Autonomous Buoyancy-Controlled Balloons
Mar 03, 2023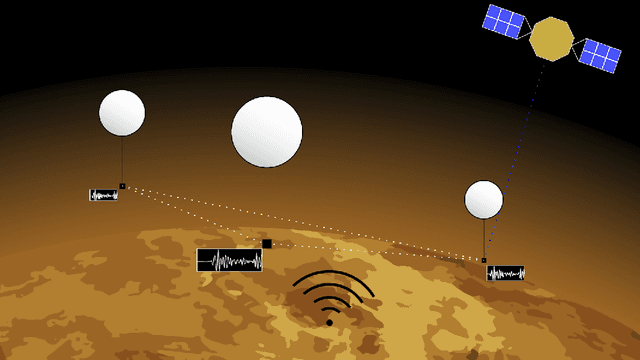

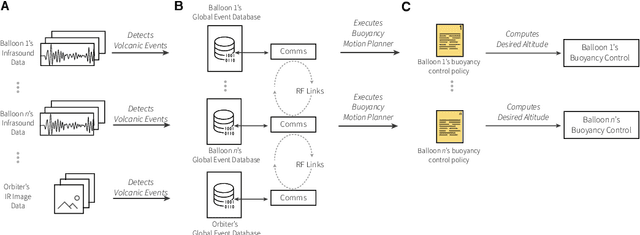

Altitude-controlled balloons hold great promise for performing high-priority scientific investigations of Venus's atmosphere and geological phenomena, including tectonic and volcanic activity, as demonstrated by a number of recent Earth-based experiments. In this paper, we explore a concept of operations where multiple autonomous, altitude-controlled balloons monitor explosive volcanic activity on Venus through infrasound microbarometers, and autonomously navigate the uncertain wind field to perform follow-on observations of detected events of interest. We propose a novel autonomous guidance technique for altitude-controlled balloons in Venus's uncertain wind field, and show the approach can result in an increase of up to 63% in the number of close-up observations of volcanic events compared to passive drifters, and a 16% increase compared to ground-in-the-loop guidance. The results are robust to uncertainty in the wind field, and hold across large changes in the frequency of explosive volcanic events, sensitivity of the microbarometer detectors, and numbers of aerial platforms.
Multi-Robot On-site Shared Analytics Information and Computing
Dec 13, 2021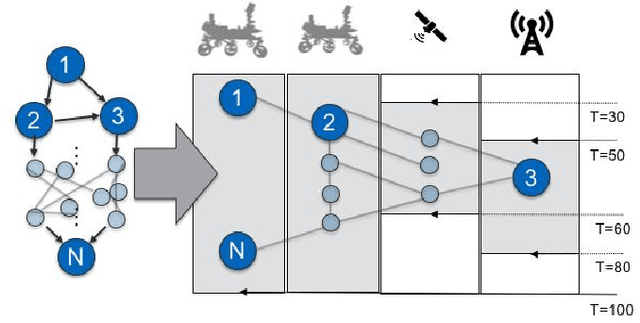
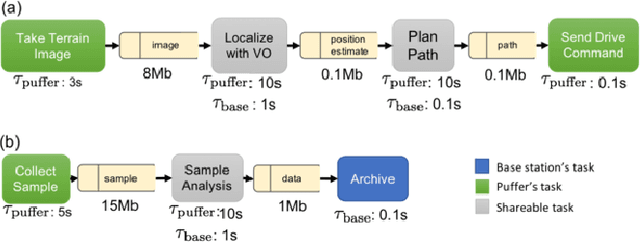
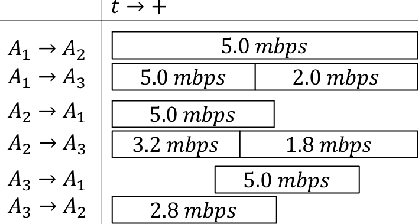
Computation load-sharing across a network of heterogeneous robots is a promising approach to increase robots capabilities and efficiency as a team in extreme environments. However, in such environments, communication links may be intermittent and connections to the cloud or internet may be nonexistent. In this paper we introduce a communication-aware, computation task scheduling problem for multi-robot systems and propose an integer linear program (ILP) that optimizes the allocation of computational tasks across a network of heterogeneous robots, accounting for the networked robots' computational capabilities and for available (and possibly time-varying) communication links. We consider scheduling of a set of inter-dependent required and optional tasks modeled by a dependency graph. We present a consensus-backed scheduling architecture for shared-world, distributed systems. We validate the ILP formulation and the distributed implementation in different computation platforms and in simulated scenarios with a bias towards lunar or planetary exploration scenarios. Our results show that the proposed implementation can optimize schedules to allow a threefold increase the amount of rewarding tasks performed (e.g., science measurements) compared to an analogous system with no computational load-sharing.
A Visual Analytics Approach to Debugging Cooperative, Autonomous Multi-Robot Systems' Worldviews
Sep 03, 2020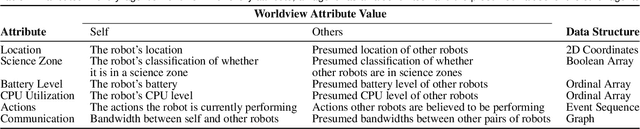
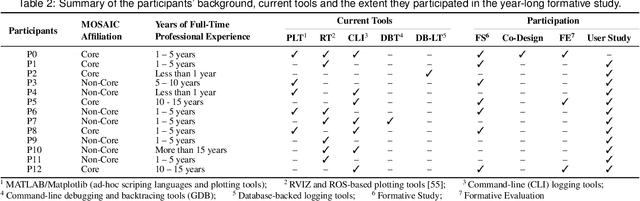
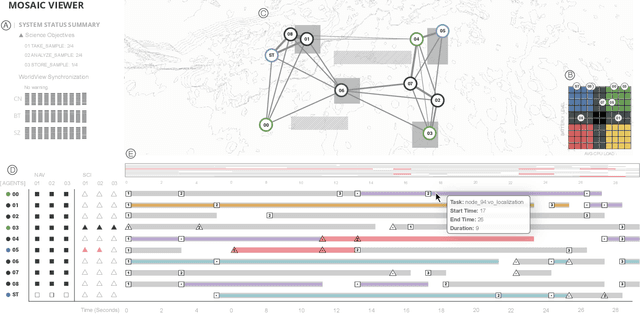
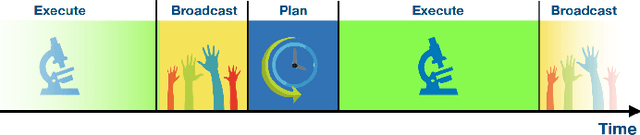
Autonomous multi-robot systems, where a team of robots shares information to perform tasks that are beyond an individual robot's abilities, hold great promise for a number of applications, such as planetary exploration missions. Each robot in a multi-robot system that uses the shared-world coordination paradigm autonomously schedules which robot should perform a given task, and when, using its worldview--the robot's internal representation of its belief about both its own state, and other robots' states. A key problem for operators is that robots' worldviews can fall out of sync (often due to weak communication links), leading to desynchronization of the robots' scheduling decisions and inconsistent emergent behavior (e.g., tasks not performed, or performed by multiple robots). Operators face the time-consuming and difficult task of making sense of the robots' scheduling decisions, detecting de-synchronizations, and pinpointing the cause by comparing every robot's worldview. To address these challenges, we introduce MOSAIC Viewer, a visual analytics system that helps operators (i) make sense of the robots' schedules and (ii) detect and conduct a root cause analysis of the robots' desynchronized worldviews. Over a year-long partnership with roboticists at the NASA Jet Propulsion Laboratory, we conduct a formative study to identify the necessary system design requirements and a qualitative evaluation with 12 roboticists. We find that MOSAIC Viewer is faster- and easier-to-use than the users' current approaches, and it allows them to stitch low-level details to formulate a high-level understanding of the robots' schedules and detect and pinpoint the cause of the desynchronized worldviews.