 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlight Demonstration and Model Validation of a Prototype Variable-Altitude Venus Aerobot
Nov 11, 2024
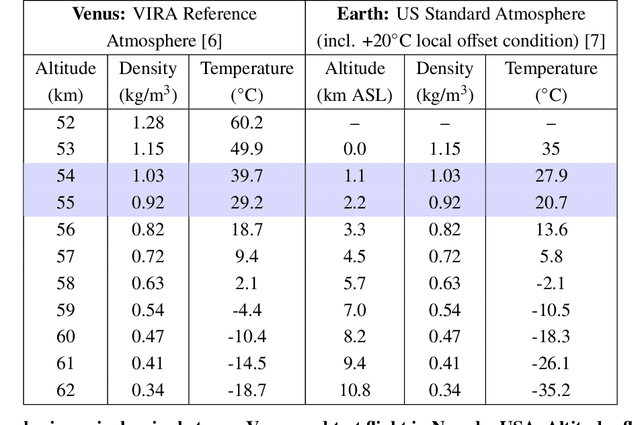
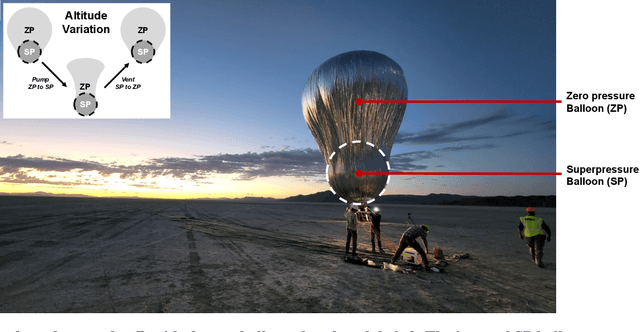
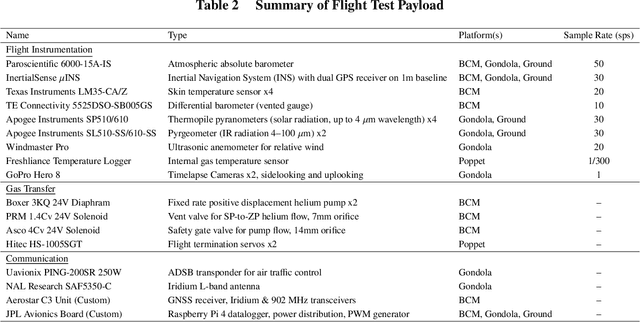
This paper details a significant milestone towards maturing a buoyant aerial robotic platform, or aerobot, for flight in the Venus clouds. We describe two flights of our subscale altitude-controlled aerobot, fabricated from the materials necessary to survive Venus conditions. During these flights over the Nevada Black Rock desert, the prototype flew at the identical atmospheric densities as 54 to 55 km cloud layer altitudes on Venus. We further describe a first-principle aerobot dynamics model which we validate against the Nevada flight data and subsequently employ to predict the performance of future aerobots on Venus. The aerobot discussed in this paper is under JPL development for an in-situ mission flying multiple circumnavigations of Venus, sampling the chemical and physical properties of the planet's atmosphere and also remotely sensing surface properties.
Proximal Exploration of Venus Volcanism with Teams of Autonomous Buoyancy-Controlled Balloons
Mar 03, 2023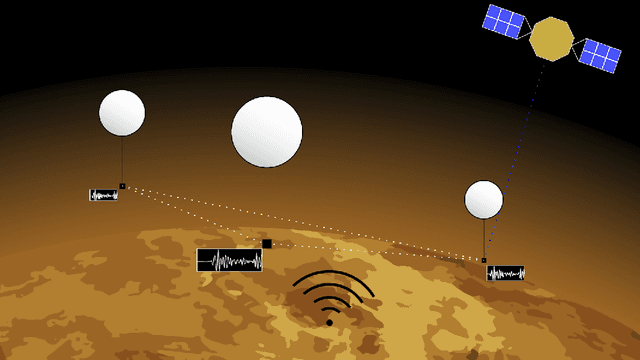

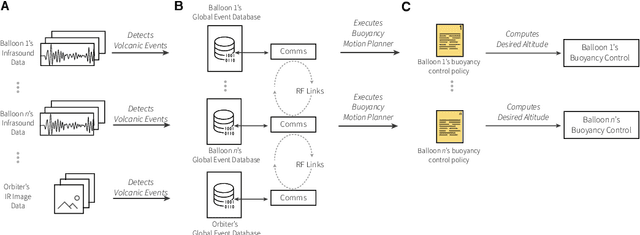

Altitude-controlled balloons hold great promise for performing high-priority scientific investigations of Venus's atmosphere and geological phenomena, including tectonic and volcanic activity, as demonstrated by a number of recent Earth-based experiments. In this paper, we explore a concept of operations where multiple autonomous, altitude-controlled balloons monitor explosive volcanic activity on Venus through infrasound microbarometers, and autonomously navigate the uncertain wind field to perform follow-on observations of detected events of interest. We propose a novel autonomous guidance technique for altitude-controlled balloons in Venus's uncertain wind field, and show the approach can result in an increase of up to 63% in the number of close-up observations of volcanic events compared to passive drifters, and a 16% increase compared to ground-in-the-loop guidance. The results are robust to uncertainty in the wind field, and hold across large changes in the frequency of explosive volcanic events, sensitivity of the microbarometer detectors, and numbers of aerial platforms.