 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning, scheduling, and execution on the Moon: the CADRE technology demonstration mission
Feb 20, 2025NASA's Cooperative Autonomous Distributed Robotic Exploration (CADRE) mission, slated for flight to the Moon's Reiner Gamma region in 2025/2026, is designed to demonstrate multi-agent autonomous exploration of the Lunar surface and sub-surface. A team of three robots and a base station will autonomously explore a region near the lander, collecting the data required for 3D reconstruction of the surface with no human input; and then autonomously perform distributed sensing with multi-static ground penetrating radars (GPR), driving in formation while performing coordinated radar soundings to create a map of the subsurface. At the core of CADRE's software architecture is a novel autonomous, distributed planning, scheduling, and execution (PS&E) system. The system coordinates the robots' activities, planning and executing tasks that require multiple robots' participation while ensuring that each individual robot's thermal and power resources stay within prescribed bounds, and respecting ground-prescribed sleep-wake cycles. The system uses a centralized-planning, distributed-execution paradigm, and a leader election mechanism ensures robustness to failures of individual agents. In this paper, we describe the architecture of CADRE's PS&E system; discuss its design rationale; and report on verification and validation (V&V) testing of the system on CADRE's hardware in preparation for deployment on the Moon.
Stochastic Guidance of Buoyancy Controlled Vehicles under Ice Shelves using Ocean Currents
Jun 10, 2024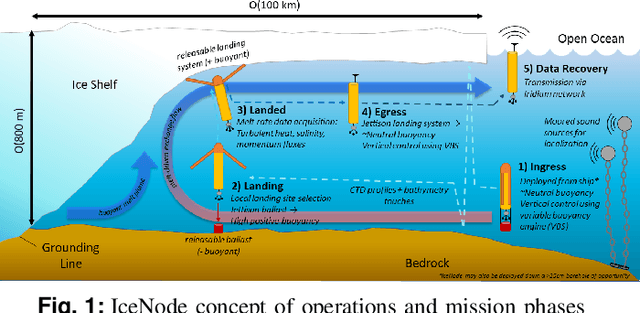

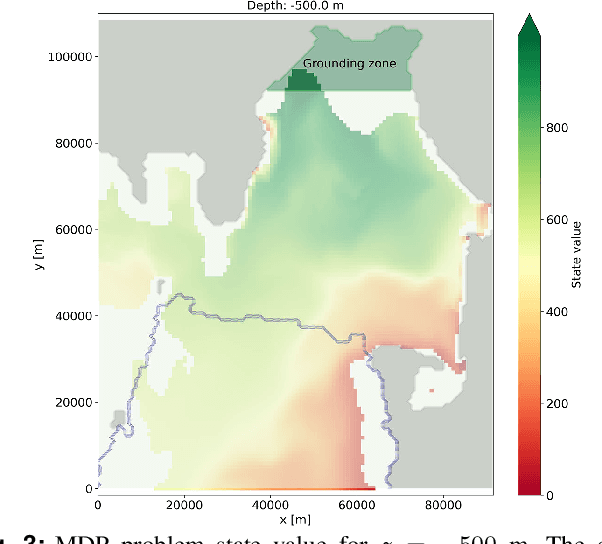
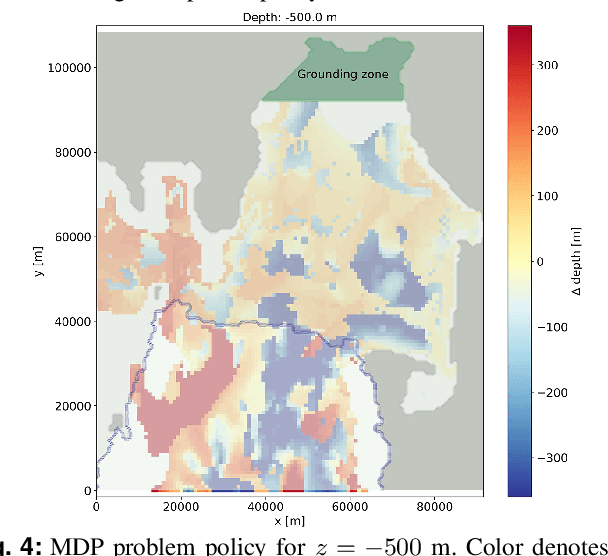
We propose a novel technique for guidance of buoyancy-controlled vehicles in uncertain under-ice ocean flows. In-situ melt rate measurements collected at the grounding zone of Antarctic ice shelves, where the ice shelf meets the underlying bedrock, are essential to constrain models of future sea level rise. Buoyancy-controlled vehicles, which control their vertical position in the water column through internal actuation but have no means of horizontal propulsion, offer an affordable and reliable platform for such in-situ data collection. However, reaching the grounding zone requires vehicles to traverse tens of kilometers under the ice shelf, with approximate position knowledge and no means of communication, in highly variable and uncertain ocean currents. To address this challenge, we propose a partially observable MDP approach that exploits model-based knowledge of the under-ice currents and, critically, of their uncertainty, to synthesize effective guidance policies. The approach uses approximate dynamic programming to model uncertainty in the currents, and QMDP to address localization uncertainty. Numerical experiments show that the policy can deliver up to 88.8% of underwater vehicles to the grounding zone -- a 33% improvement compared to state-of-the-art guidance techniques, and a 262% improvement over uncontrolled drifters. Collectively, these results show that model-based under-ice guidance is a highly promising technique for exploration of under-ice cavities, and has the potential to enable cost-effective and scalable access to these challenging and rarely observed environments.