 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTRADE: Object Tracking with 3D Trajectory and Ground Depth Estimates for UAVs
Oct 07, 2022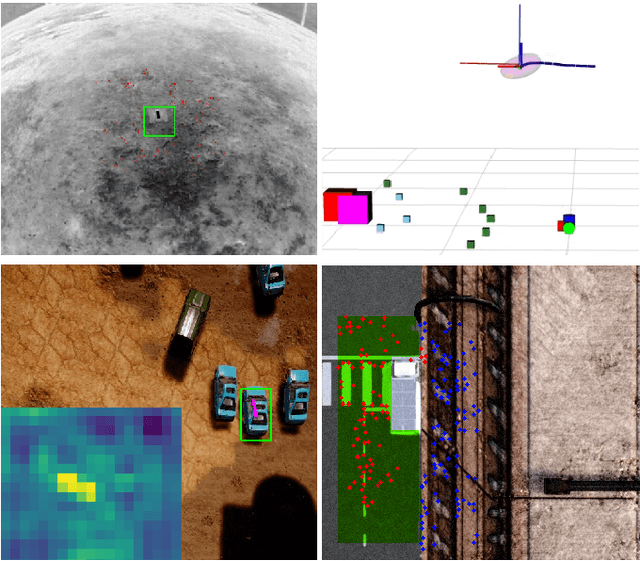

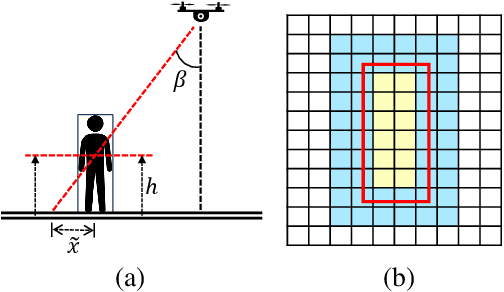
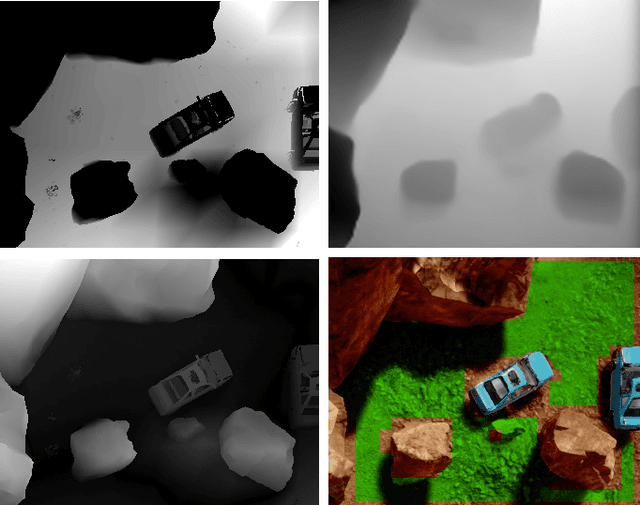
We propose TRADE for robust tracking and 3D localization of a moving target in cluttered environments, from UAVs equipped with a single camera. Ultimately TRADE enables 3d-aware target following. Tracking-by-detection approaches are vulnerable to target switching, especially between similar objects. Thus, TRADE predicts and incorporates the target 3D trajectory to select the right target from the tracker's response map. Unlike static environments, depth estimation of a moving target from a single camera is a ill-posed problem. Therefore we propose a novel 3D localization method for ground targets on complex terrain. It reasons about scene geometry by combining ground plane segmentation, depth-from-motion and single-image depth estimation. The benefits of using TRADE are demonstrated as tracking robustness and depth accuracy on several dynamic scenes simulated in this work. Additionally, we demonstrate autonomous target following using a thermal camera by running TRADE on a quadcopter's board computer.
Operations for Autonomous Spacecraft
Nov 22, 2021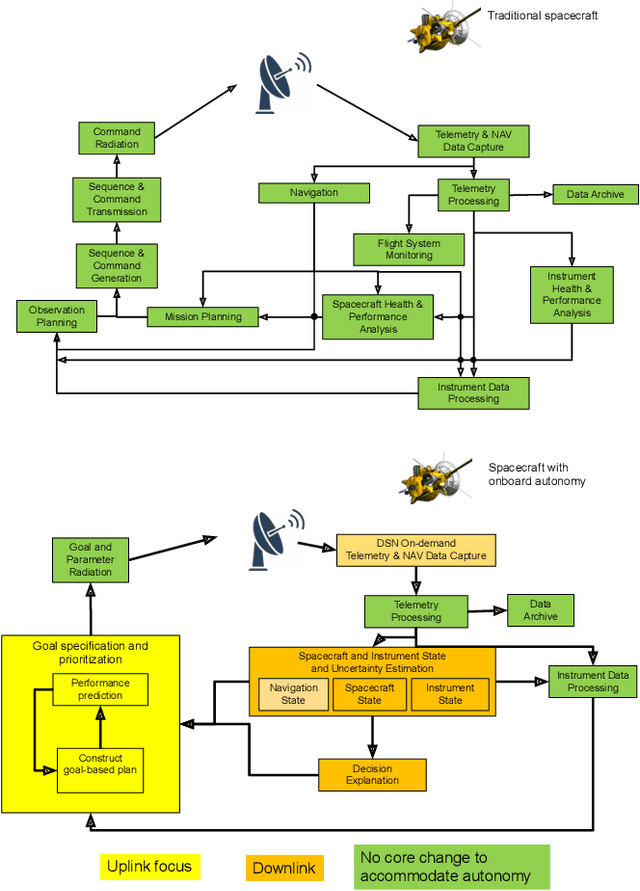
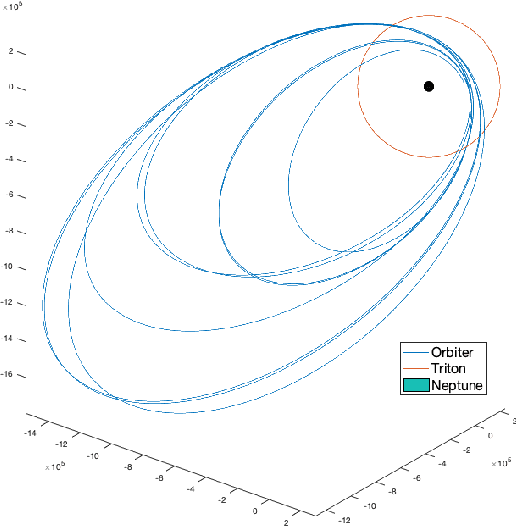
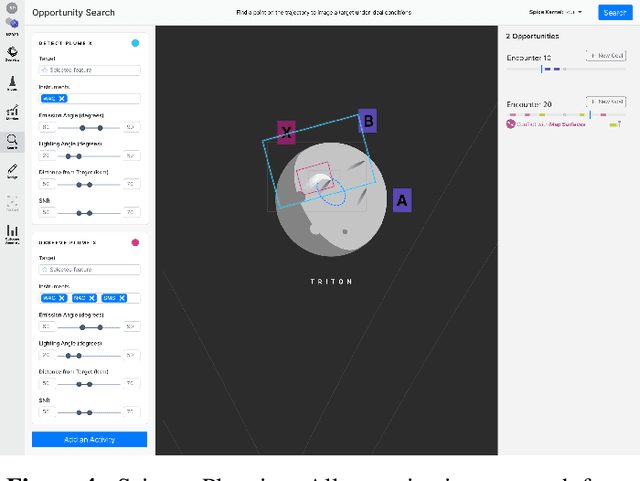
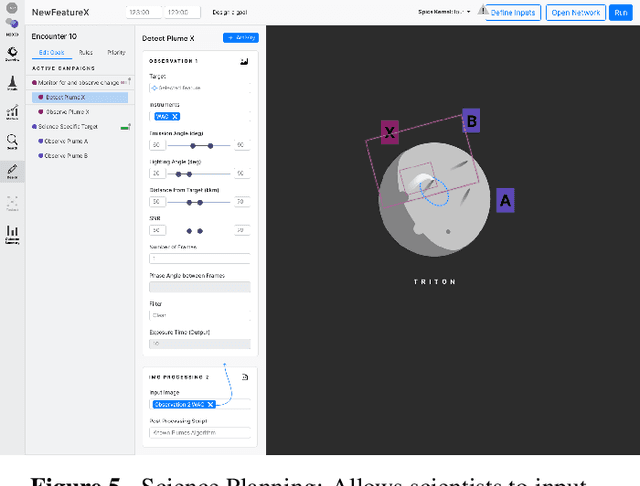
Onboard autonomy technologies such as planning and scheduling, identification of scientific targets, and content-based data summarization, will lead to exciting new space science missions. However, the challenge of operating missions with such onboard autonomous capabilities has not been studied to a level of detail sufficient for consideration in mission concepts. These autonomy capabilities will require changes to current operations processes, practices, and tools. We have developed a case study to assess the changes needed to enable operators and scientists to operate an autonomous spacecraft by facilitating a common model between the ground personnel and the onboard algorithms. We assess the new operations tools and workflows necessary to enable operators and scientists to convey their desired intent to the spacecraft, and to be able to reconstruct and explain the decisions made onboard and the state of the spacecraft. Mock-ups of these tools were used in a user study to understand the effectiveness of the processes and tools in enabling a shared framework of understanding, and in the ability of the operators and scientists to effectively achieve mission science objectives.