 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Real-World Validation of a Physics-Based Ship Motion Prediction Model
Jan 23, 2025



The maritime industry aims towards a sustainable future, which requires significant improvements in operational efficiency. Current approaches focus on minimising fuel consumption and emissions through greater autonomy. Efficient and safe autonomous navigation requires high-fidelity ship motion models applicable to real-world conditions. Although physics-based ship motion models can predict ships' motion with sub-second resolution, their validation in real-world conditions is rarely found in the literature. This study presents a physics-based 3D dynamics motion model that is tailored to a container-ship, and compares its predictions against real-world voyages. The model integrates vessel motion over time and accounts for its hydrodynamic behavior under different environmental conditions. The model's predictions are evaluated against real vessel data both visually and using multiple distance measures. Both methodologies demonstrate that the model's predictions align closely with the real-world trajectories of the container-ship.
Impact-Aware Bimanual Catching of Large-Momentum Objects
Mar 25, 2024



This paper investigates one of the most challenging tasks in dynamic manipulation -- catching large-momentum moving objects. Beyond the realm of quasi-static manipulation, dealing with highly dynamic objects can significantly improve the robot's capability of interacting with its surrounding environment. Yet, the inevitable motion mismatch between the fast moving object and the approaching robot will result in large impulsive forces, which lead to the unstable contacts and irreversible damage to both the object and the robot. To address the above problems, we propose an online optimization framework to: 1) estimate and predict the linear and angular motion of the object; 2) search and select the optimal contact locations across every surface of the object to mitigate impact through sequential quadratic programming (SQP); 3) simultaneously optimize the end-effector motion, stiffness, and contact force for both robots using multi-mode trajectory optimization (MMTO); and 4) realise the impact-aware catching motion on the compliant robotic system based on indirect force controller. We validate the impulse distribution, contact selection, and impact-aware MMTO algorithms in simulation and demonstrate the benefits of the proposed framework in real-world experiments including catching large-momentum moving objects with well-defined motion, constrained motion and free-flying motion.
Predictive and Robust Robot Assistance for Sequential Manipulation
Sep 08, 2023



This paper presents a novel concept to support physically impaired humans in daily object manipulation tasks with a robot. Given a user's manipulation sequence, we propose a predictive model that uniquely casts the user's sequential behavior as well as a robot support intervention into a hierarchical multi-objective optimization problem. A major contribution is the prediction formulation, which allows to consider several different future paths concurrently. The second contribution is the encoding of a general notion of constancy constraints, which allows to consider dependencies between consecutive or far apart keyframes (in time or space) of a sequential task. We perform numerical studies, simulations and robot experiments to analyse and evaluate the proposed method in several table top tasks where a robot supports impaired users by predicting their posture and proactively re-arranging objects.
Communicating Robot's Intentions while Assisting Users via Augmented Reality
Aug 21, 2023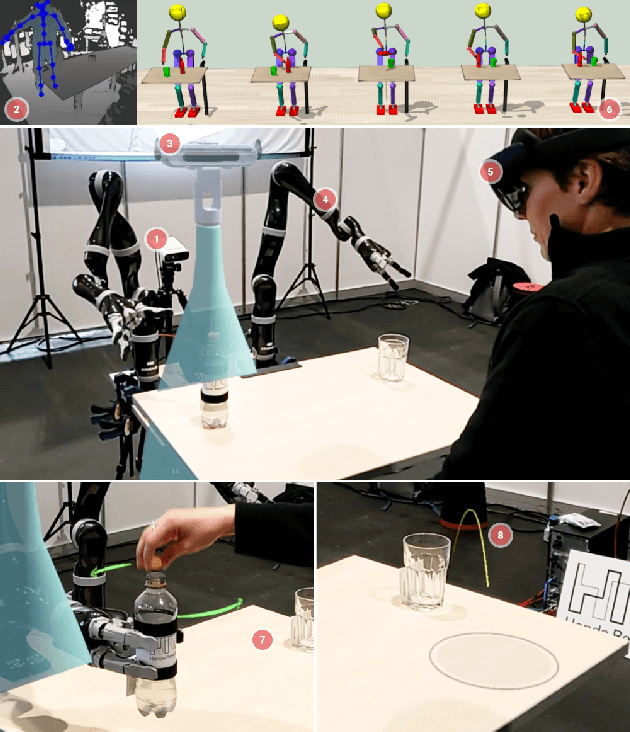
This paper explores the challenges faced by assistive robots in effectively cooperating with humans, requiring them to anticipate human behavior, predict their actions' impact, and generate understandable robot actions. The study focuses on a use-case involving a user with limited mobility needing assistance with pouring a beverage, where tasks like unscrewing a cap or reaching for objects demand coordinated support from the robot. Yet, anticipating the robot's intentions can be challenging for the user, which can hinder effective collaboration. To address this issue, we propose an innovative solution that utilizes Augmented Reality (AR) to communicate the robot's intentions and expected movements to the user, fostering a seamless and intuitive interaction.
A behavioural transformer for effective collaboration between a robot and a non-stationary human
Jul 25, 2023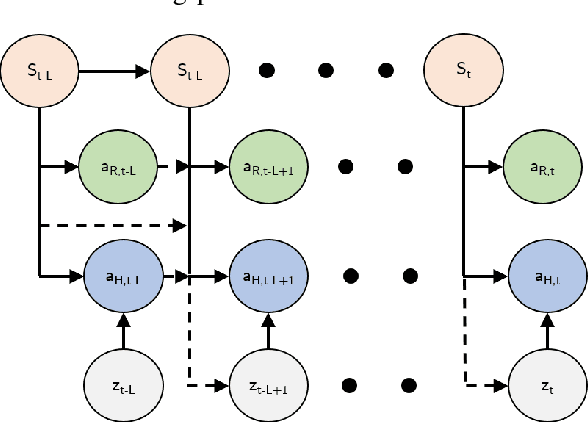
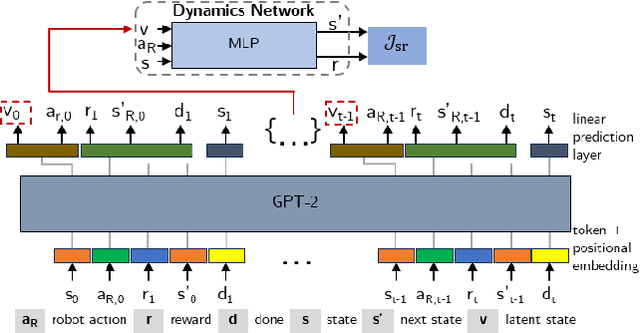
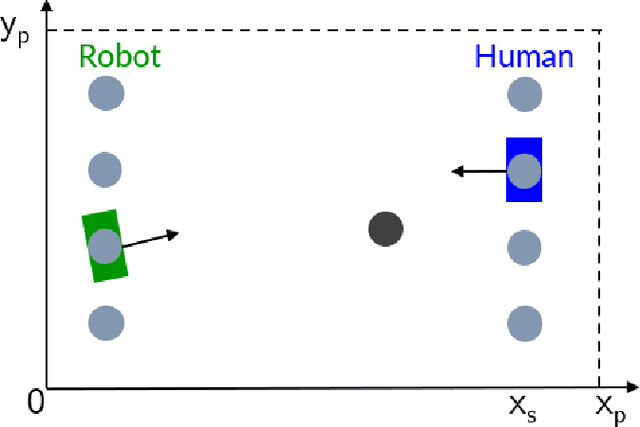
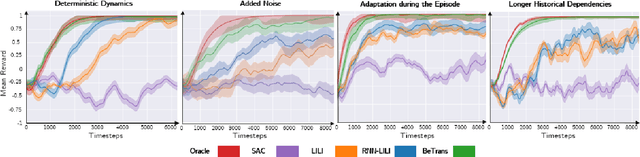
A key challenge in human-robot collaboration is the non-stationarity created by humans due to changes in their behaviour. This alters environmental transitions and hinders human-robot collaboration. We propose a principled meta-learning framework to explore how robots could better predict human behaviour, and thereby deal with issues of non-stationarity. On the basis of this framework, we developed Behaviour-Transform (BeTrans). BeTrans is a conditional transformer that enables a robot agent to adapt quickly to new human agents with non-stationary behaviours, due to its notable performance with sequential data. We trained BeTrans on simulated human agents with different systematic biases in collaborative settings. We used an original customisable environment to show that BeTrans effectively collaborates with simulated human agents and adapts faster to non-stationary simulated human agents than SOTA techniques.
ROS-PyBullet Interface: A Framework for Reliable Contact Simulation and Human-Robot Interaction
Oct 13, 2022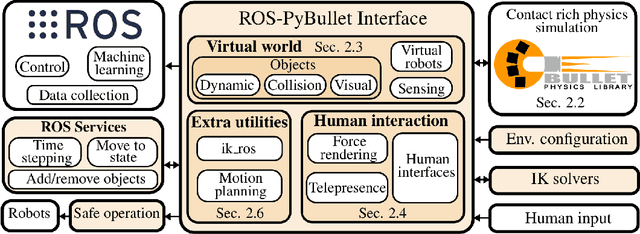
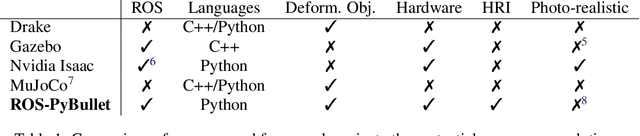
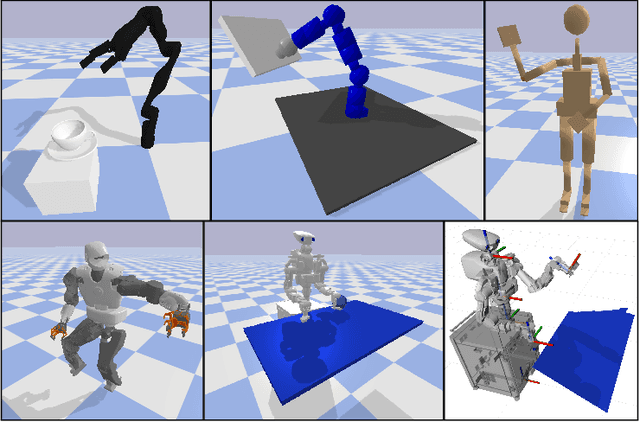
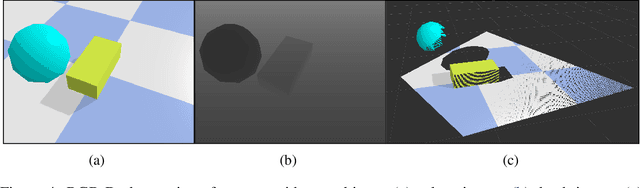
Reliable contact simulation plays a key role in the development of (semi-)autonomous robots, especially when dealing with contact-rich manipulation scenarios, an active robotics research topic. Besides simulation, components such as sensing, perception, data collection, robot hardware control, human interfaces, etc. are all key enablers towards applying machine learning algorithms or model-based approaches in real world systems. However, there is a lack of software connecting reliable contact simulation with the larger robotics ecosystem (i.e. ROS, Orocos), for a more seamless application of novel approaches, found in the literature, to existing robotic hardware. In this paper, we present the ROS-PyBullet Interface, a framework that provides a bridge between the reliable contact/impact simulator PyBullet and the Robot Operating System (ROS). Furthermore, we provide additional utilities for facilitating Human-Robot Interaction (HRI) in the simulated environment. We also present several use-cases that highlight the capabilities and usefulness of our framework. Please check our video, source code, and examples included in the supplementary material. Our full code base is open source and can be found at https://github.com/cmower/ros_pybullet_interface.
Set-based State Estimation with Probabilistic Consistency Guarantee under Epistemic Uncertainty
Oct 18, 2021
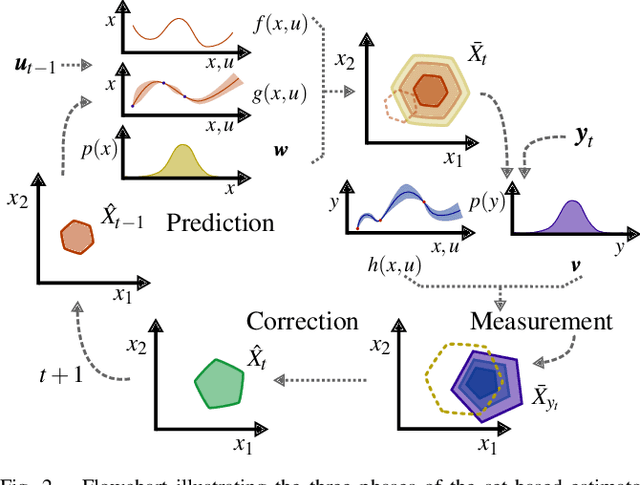
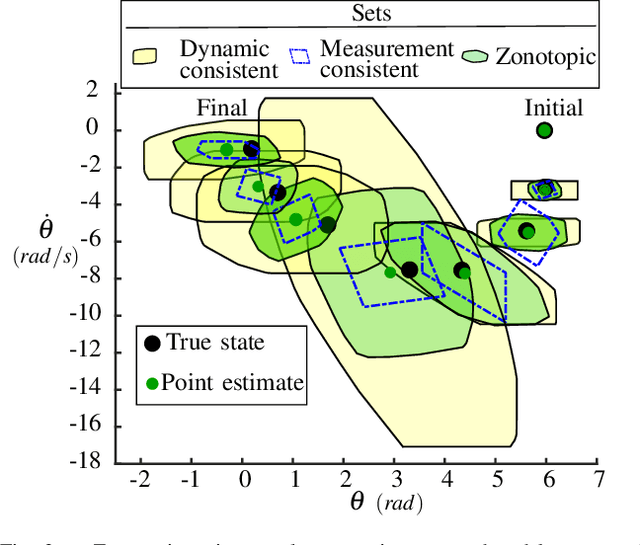
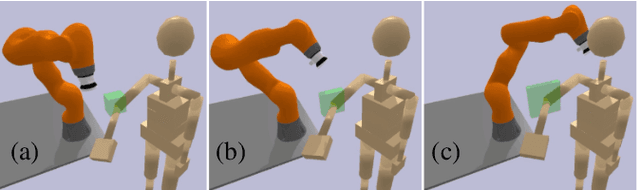
Consistent state estimation is challenging, especially under the epistemic uncertainties arising from learned (nonlinear) dynamic and observation models. In this work, we develop a set-based estimation algorithm, that produces zonotopic state estimates that respect the epistemic uncertainties in the learned models, in addition to the aleatoric uncertainties. Our algorithm guarantees probabilistic consistency, in the sense that the true state is always bounded by the zonotopes, with a high probability. We formally relate our set-based approach with the corresponding probabilistic approach (GP-EKF) in the case of learned (nonlinear) models. In particular, when linearization errors and aleatoric uncertainties are omitted, and epistemic uncertainties are simplified, our set-based approach reduces to its probabilistic counterpart. Our method's improved consistency is empirically demonstrated in both a simulated pendulum domain and a real-world robot-assisted dressing domain, where the robot estimates the configuration of the human arm utilizing the force measurements at its end effector.
Non-prehensile Planar Manipulation via Trajectory Optimization with Complementarity Constraints
Sep 27, 2021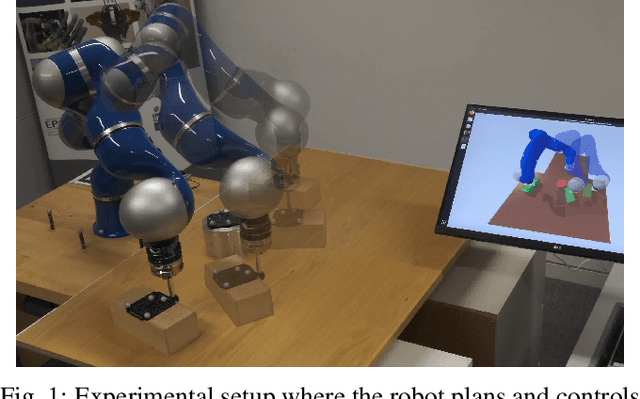
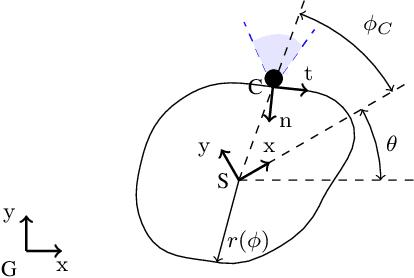
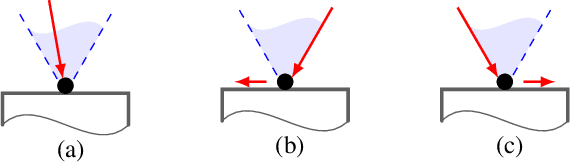
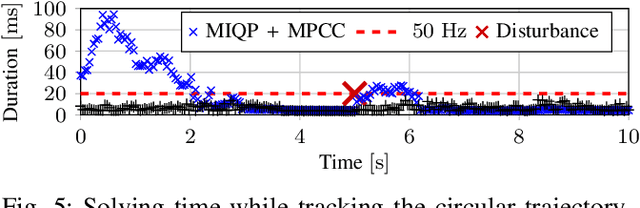
Contact adaption is an essential capability when manipulating objects. Two key contact modes of non-prehensile manipulation are sticking and sliding. This paper presents a Trajectory Optimization (TO) method formulated as a Mathematical Program with Complementarity Constraints (MPCC), which is able to switch between these two modes. We show that this formulation can be applicable to both planning and Model Predictive Control (MPC) for planar manipulation tasks. We numerically compare: (i) our planner against a mixed integer alternative, showing that the MPCC planer converges faster, scales better with respect to time horizon, and can handle environments with obstacles; (ii) our controller against a state-of-the-art mixed integer approach, showing that the MPCC controller achieves better tracking and more consistent computation times. Additionally, we experimentally validate both our planner and controller with the KUKA LWR robot on a range of planar manipulation tasks.
Decentralized Ability-Aware Adaptive Control for Multi-robot Collaborative Manipulation
Feb 07, 2021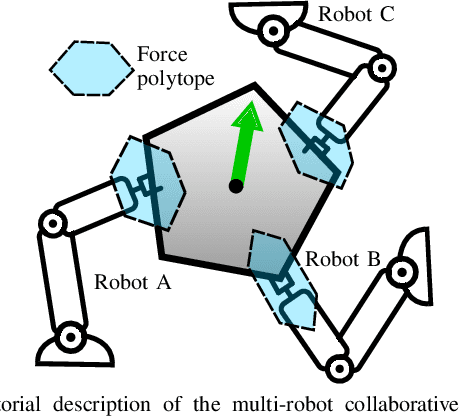
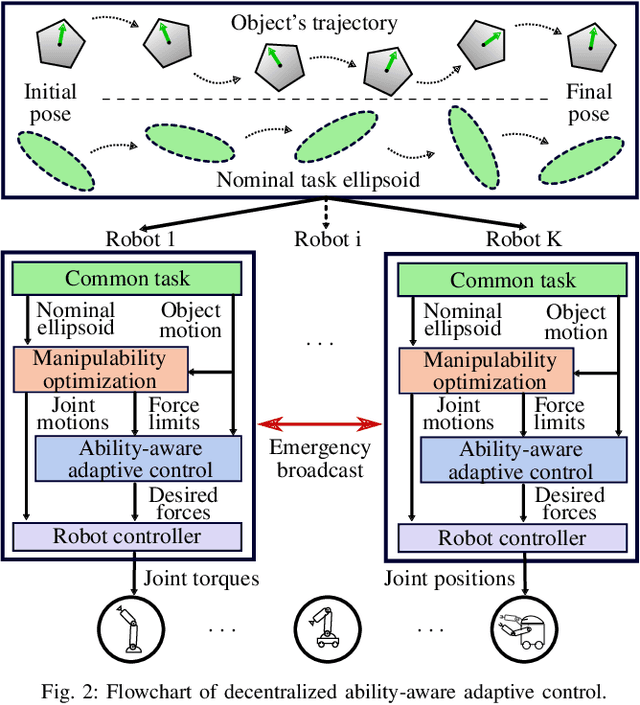
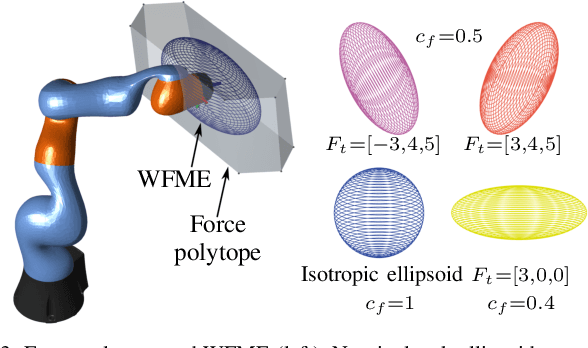
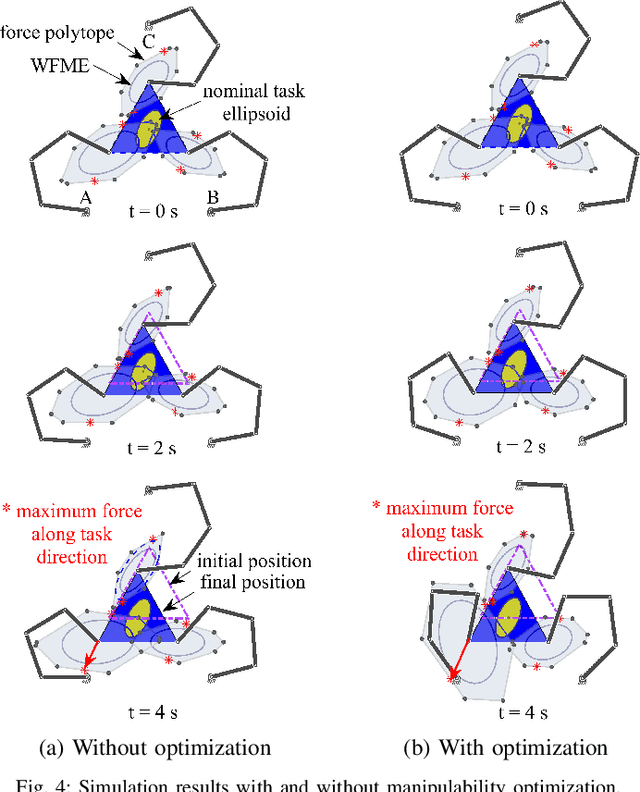
Multi-robot teams can achieve more dexterous, complex and heavier payload tasks than a single robot, yet effective collaboration is required. Multi-robot collaboration is extremely challenging due to the different kinematic and dynamics capabilities of the robots, the limited communication between them, and the uncertainty of the system parameters. In this paper, a Decentralized Ability-Aware Adaptive Control is proposed to address these challenges based on two key features. Firstly, the common manipulation task is represented by the proposed nominal task ellipsoid, which is used to maximize each robot force capability online via optimizing its configuration. Secondly, a decentralized adaptive controller is designed to be Lyapunov stable in spite of heterogeneous actuation constraints of the robots and uncertain physical parameters of the object and environment. In the proposed framework, decentralized coordination and load distribution between the robots is achieved without communication, while only the control deficiency is broadcast if any of the robots reaches its force limits. In this case, the object reference trajectory is modified in a decentralized manner to guarantee stable interaction. Finally, we perform several numerical and physical simulations to analyse and verify the proposed method with heterogeneous multi-robot teams in collaborative manipulation tasks.
Multi-modal Trajectory Optimization for Impact-aware Manipulation
Jun 23, 2020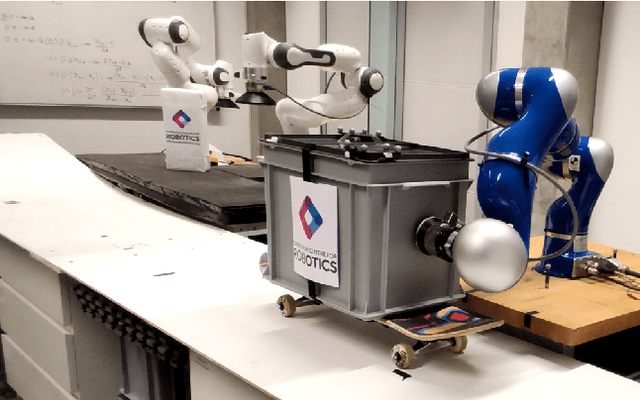
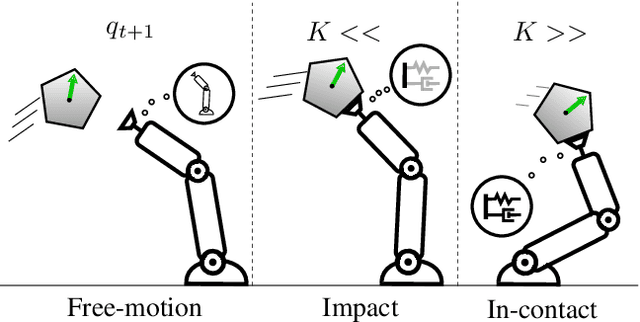
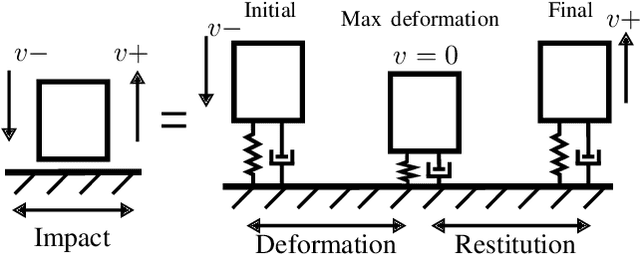

The transition from free motion to contact is a challenging problem in robotics, in part due to its hybrid nature. Yet, disregarding the effects of impacts at the motion planning level might result in intractable impulsive contact forces. In this paper, we introduce an impact-aware multi-modal trajectory optimization (TO) method that comprises both hybrid dynamics and hybrid control in a coherent fashion. A key concept is the incorporation of an explicit contact force transmission model in the TO method. This allows the simultaneous optimization of the contact forces, contact timings, continuous motion trajectories and compliance, while satisfying task constraints. We compare our method against standard compliance control and an impact-agnostic TO method in physical simulations. Further, we experimentally validate the proposed method with a robot manipulator on the task of halting a large-momentum object.