 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpTaS: An Optimization-based Task Specification Library for Trajectory Optimization and Model Predictive Control
Jan 31, 2023



This paper presents OpTaS, a task specification Python library for Trajectory Optimization (TO) and Model Predictive Control (MPC) in robotics. Both TO and MPC are increasingly receiving interest in optimal control and in particular handling dynamic environments. While a flurry of software libraries exists to handle such problems, they either provide interfaces that are limited to a specific problem formulation (e.g. TracIK, CHOMP), or are large and statically specify the problem in configuration files (e.g. EXOTica, eTaSL). OpTaS, on the other hand, allows a user to specify custom nonlinear constrained problem formulations in a single Python script allowing the controller parameters to be modified during execution. The library provides interface to several open source and commercial solvers (e.g. IPOPT, SNOPT, KNITRO, SciPy) to facilitate integration with established workflows in robotics. Further benefits of OpTaS are highlighted through a thorough comparison with common libraries. An additional key advantage of OpTaS is the ability to define optimal control tasks in the joint space, task space, or indeed simultaneously. The code for OpTaS is easily installed via pip, and the source code with examples can be found at https://github.com/cmower/optas.
ROS-PyBullet Interface: A Framework for Reliable Contact Simulation and Human-Robot Interaction
Oct 13, 2022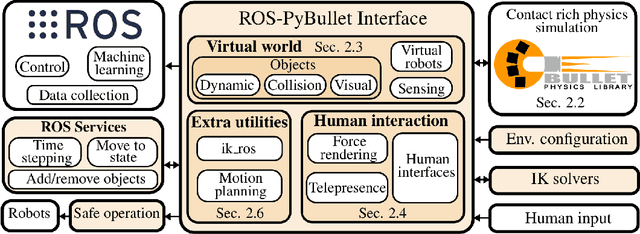
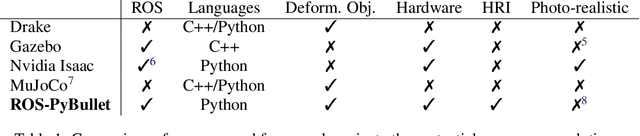
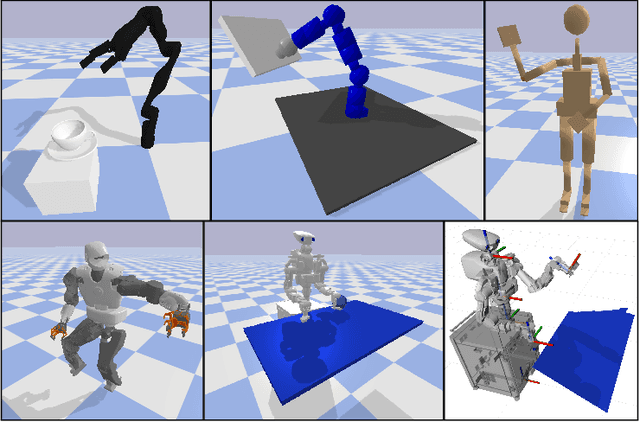
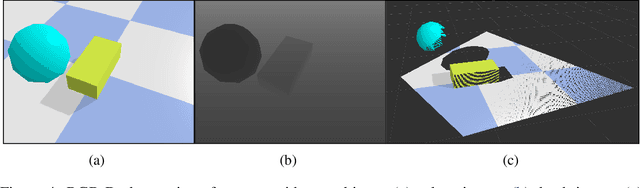
Reliable contact simulation plays a key role in the development of (semi-)autonomous robots, especially when dealing with contact-rich manipulation scenarios, an active robotics research topic. Besides simulation, components such as sensing, perception, data collection, robot hardware control, human interfaces, etc. are all key enablers towards applying machine learning algorithms or model-based approaches in real world systems. However, there is a lack of software connecting reliable contact simulation with the larger robotics ecosystem (i.e. ROS, Orocos), for a more seamless application of novel approaches, found in the literature, to existing robotic hardware. In this paper, we present the ROS-PyBullet Interface, a framework that provides a bridge between the reliable contact/impact simulator PyBullet and the Robot Operating System (ROS). Furthermore, we provide additional utilities for facilitating Human-Robot Interaction (HRI) in the simulated environment. We also present several use-cases that highlight the capabilities and usefulness of our framework. Please check our video, source code, and examples included in the supplementary material. Our full code base is open source and can be found at https://github.com/cmower/ros_pybullet_interface.