 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSet-based State Estimation with Probabilistic Consistency Guarantee under Epistemic Uncertainty
Paper and Code
Oct 18, 2021
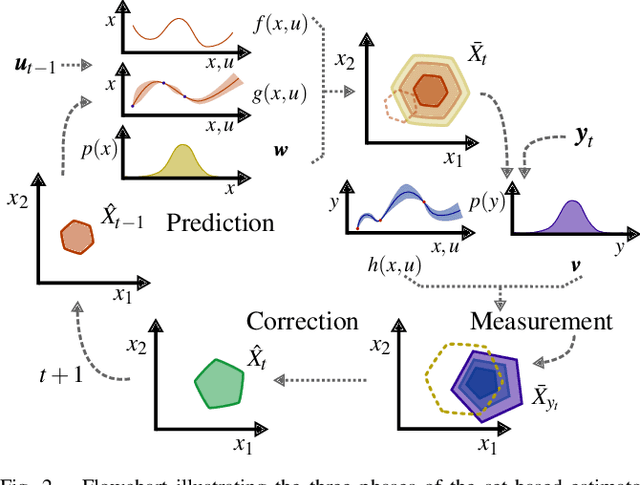
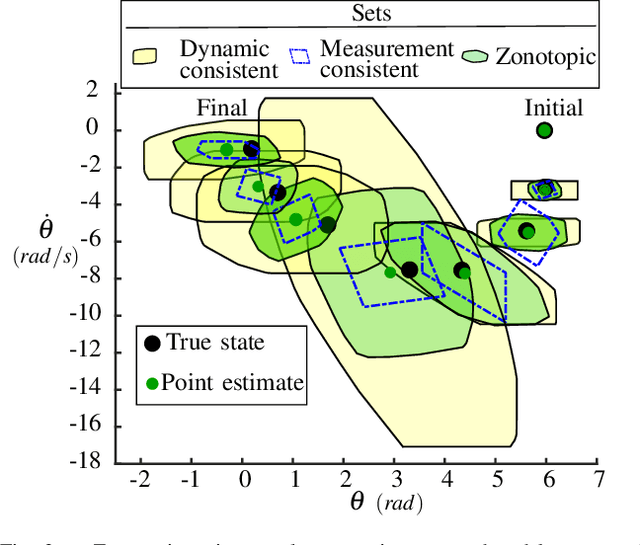
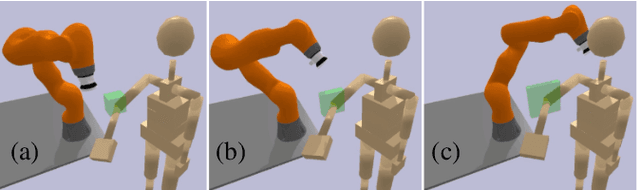
Consistent state estimation is challenging, especially under the epistemic uncertainties arising from learned (nonlinear) dynamic and observation models. In this work, we develop a set-based estimation algorithm, that produces zonotopic state estimates that respect the epistemic uncertainties in the learned models, in addition to the aleatoric uncertainties. Our algorithm guarantees probabilistic consistency, in the sense that the true state is always bounded by the zonotopes, with a high probability. We formally relate our set-based approach with the corresponding probabilistic approach (GP-EKF) in the case of learned (nonlinear) models. In particular, when linearization errors and aleatoric uncertainties are omitted, and epistemic uncertainties are simplified, our set-based approach reduces to its probabilistic counterpart. Our method's improved consistency is empirically demonstrated in both a simulated pendulum domain and a real-world robot-assisted dressing domain, where the robot estimates the configuration of the human arm utilizing the force measurements at its end effector.