 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActivation-Space Uncertainty Quantification for Pretrained Networks
Feb 16, 2026Reliable uncertainty estimates are crucial for deploying pretrained models; yet, many strong methods for quantifying uncertainty require retraining, Monte Carlo sampling, or expensive second-order computations and may alter a frozen backbone's predictions. To address this, we introduce Gaussian Process Activations (GAPA), a post-hoc method that shifts Bayesian modeling from weights to activations. GAPA replaces standard nonlinearities with Gaussian-process activations whose posterior mean exactly matches the original activation, preserving the backbone's point predictions by construction while providing closed-form epistemic variances in activation space. To scale to modern architectures, we use a sparse variational inducing-point approximation over cached training activations, combined with local k-nearest-neighbor subset conditioning, enabling deterministic single-pass uncertainty propagation without sampling, backpropagation, or second-order information. Across regression, classification, image segmentation, and language modeling, GAPA matches or outperforms strong post-hoc baselines in calibration and out-of-distribution detection while remaining efficient at test time.
Post-Hoc Uncertainty Quantification in Pre-Trained Neural Networks via Activation-Level Gaussian Processes
Feb 28, 2025


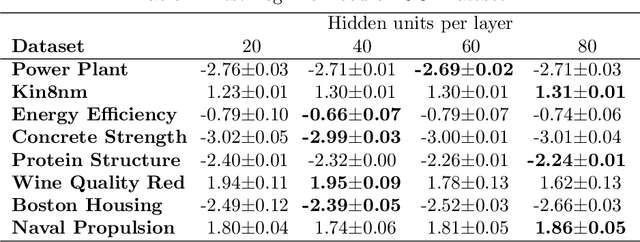
Uncertainty quantification in neural networks through methods such as Dropout, Bayesian neural networks and Laplace approximations is either prone to underfitting or computationally demanding, rendering these approaches impractical for large-scale datasets. In this work, we address these shortcomings by shifting the focus from uncertainty in the weight space to uncertainty at the activation level, via Gaussian processes. More specifically, we introduce the Gaussian Process Activation function (GAPA) to capture neuron-level uncertainties. Our approach operates in a post-hoc manner, preserving the original mean predictions of the pre-trained neural network and thereby avoiding the underfitting issues commonly encountered in previous methods. We propose two methods. The first, GAPA-Free, employs empirical kernel learning from the training data for the hyperparameters and is highly efficient during training. The second, GAPA-Variational, learns the hyperparameters via gradient descent on the kernels, thus affording greater flexibility. Empirical results demonstrate that GAPA-Variational outperforms the Laplace approximation on most datasets in at least one of the uncertainty quantification metrics.
Iterative Batch Reinforcement Learning via Safe Diversified Model-based Policy Search
Nov 14, 2024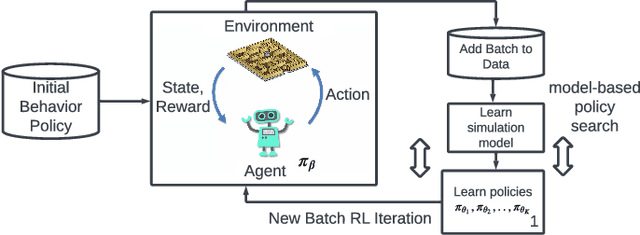
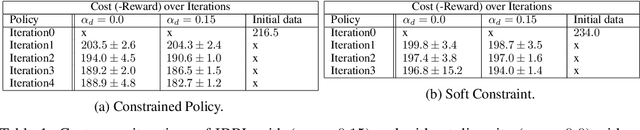
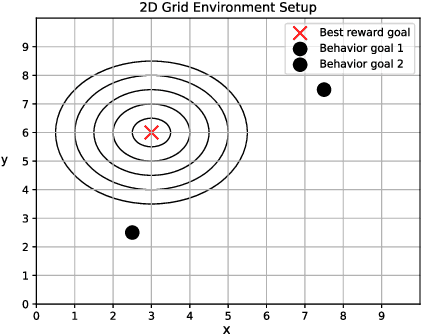

Batch reinforcement learning enables policy learning without direct interaction with the environment during training, relying exclusively on previously collected sets of interactions. This approach is, therefore, well-suited for high-risk and cost-intensive applications, such as industrial control. Learned policies are commonly restricted to act in a similar fashion as observed in the batch. In a real-world scenario, learned policies are deployed in the industrial system, inevitably leading to the collection of new data that can subsequently be added to the existing recording. The process of learning and deployment can thus take place multiple times throughout the lifespan of a system. In this work, we propose to exploit this iterative nature of applying offline reinforcement learning to guide learned policies towards efficient and informative data collection during deployment, leading to continuous improvement of learned policies while remaining within the support of collected data. We present an algorithmic methodology for iterative batch reinforcement learning based on ensemble-based model-based policy search, augmented with safety and, importantly, a diversity criterion.
Lightning UQ Box: A Comprehensive Framework for Uncertainty Quantification in Deep Learning
Oct 04, 2024



Uncertainty quantification (UQ) is an essential tool for applying deep neural networks (DNNs) to real world tasks, as it attaches a degree of confidence to DNN outputs. However, despite its benefits, UQ is often left out of the standard DNN workflow due to the additional technical knowledge required to apply and evaluate existing UQ procedures. Hence there is a need for a comprehensive toolbox that allows the user to integrate UQ into their modelling workflow, without significant overhead. We introduce \texttt{Lightning UQ Box}: a unified interface for applying and evaluating various approaches to UQ. In this paper, we provide a theoretical and quantitative comparison of the wide range of state-of-the-art UQ methods implemented in our toolbox. We focus on two challenging vision tasks: (i) estimating tropical cyclone wind speeds from infrared satellite imagery and (ii) estimating the power output of solar panels from RGB images of the sky. By highlighting the differences between methods our results demonstrate the need for a broad and approachable experimental framework for UQ, that can be used for benchmarking UQ methods. The toolbox, example implementations, and further information are available at: https://github.com/lightning-uq-box/lightning-uq-box
Uncertainty Aware Tropical Cyclone Wind Speed Estimation from Satellite Data
Apr 12, 2024



Deep neural networks (DNNs) have been successfully applied to earth observation (EO) data and opened new research avenues. Despite the theoretical and practical advances of these techniques, DNNs are still considered black box tools and by default are designed to give point predictions. However, the majority of EO applications demand reliable uncertainty estimates that can support practitioners in critical decision making tasks. This work provides a theoretical and quantitative comparison of existing uncertainty quantification methods for DNNs applied to the task of wind speed estimation in satellite imagery of tropical cyclones. We provide a detailed evaluation of predictive uncertainty estimates from state-of-the-art uncertainty quantification (UQ) methods for DNNs. We find that predictive uncertainties can be utilized to further improve accuracy and analyze the predictive uncertainties of different methods across storm categories.
Decomposition of Uncertainty in Bayesian Deep Learning for Efficient and Risk-sensitive Learning
Jun 15, 2018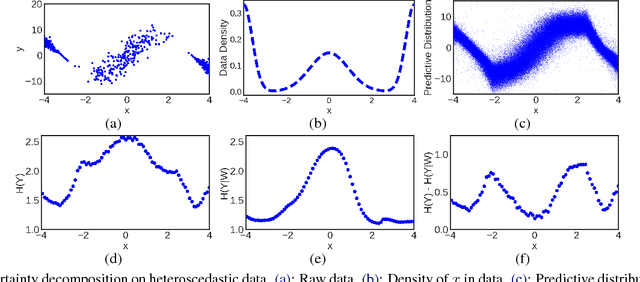
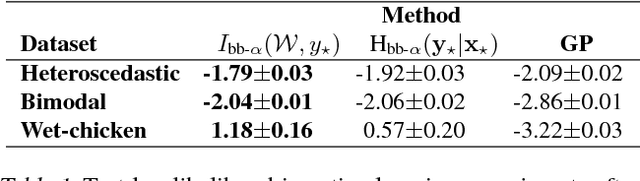
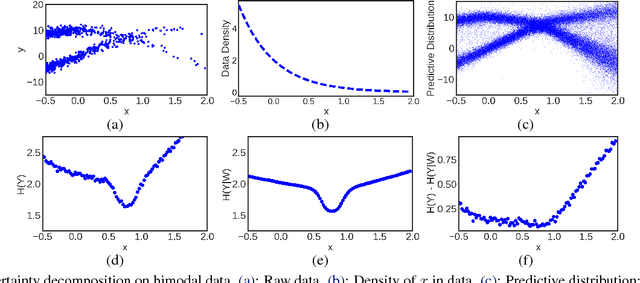
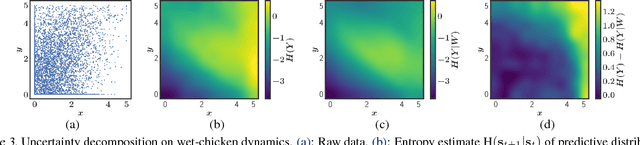
Bayesian neural networks with latent variables are scalable and flexible probabilistic models: They account for uncertainty in the estimation of the network weights and, by making use of latent variables, can capture complex noise patterns in the data. We show how to extract and decompose uncertainty into epistemic and aleatoric components for decision-making purposes. This allows us to successfully identify informative points for active learning of functions with heteroscedastic and bimodal noise. Using the decomposition we further define a novel risk-sensitive criterion for reinforcement learning to identify policies that balance expected cost, model-bias and noise aversion.
Solving Bongard Problems with a Visual Language and Pragmatic Reasoning
Apr 12, 2018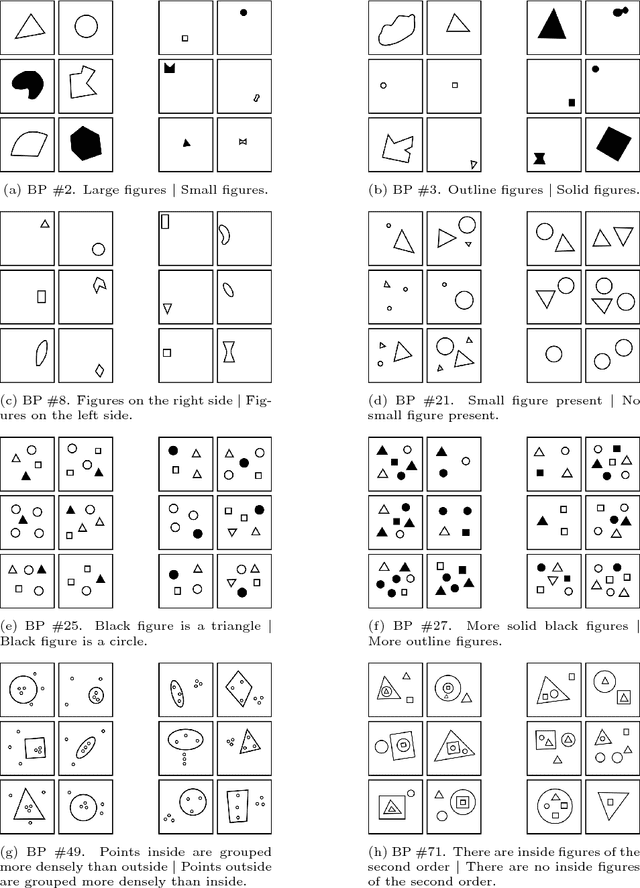
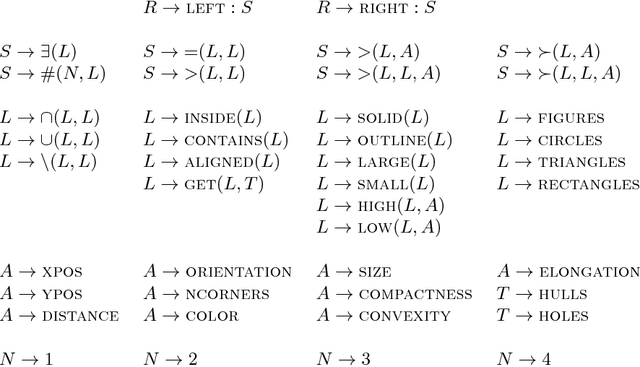
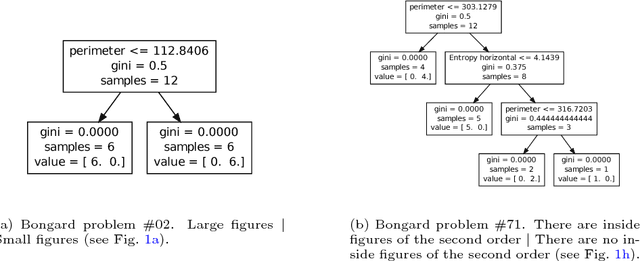
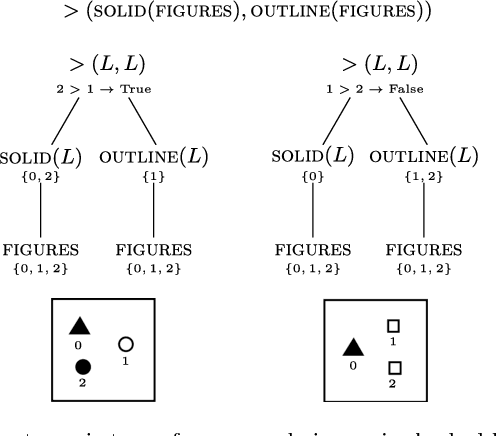
More than 50 years ago Bongard introduced 100 visual concept learning problems as a testbed for intelligent vision systems. These problems are now known as Bongard problems. Although they are well known in the cognitive science and AI communities only moderate progress has been made towards building systems that can solve a substantial subset of them. In the system presented here, visual features are extracted through image processing and then translated into a symbolic visual vocabulary. We introduce a formal language that allows representing complex visual concepts based on this vocabulary. Using this language and Bayesian inference, complex visual concepts can be induced from the examples that are provided in each Bongard problem. Contrary to other concept learning problems the examples from which concepts are induced are not random in Bongard problems, instead they are carefully chosen to communicate the concept, hence requiring pragmatic reasoning. Taking pragmatic reasoning into account we find good agreement between the concepts with high posterior probability and the solutions formulated by Bongard himself. While this approach is far from solving all Bongard problems, it solves the biggest fraction yet.
A Benchmark Environment Motivated by Industrial Control Problems
Feb 06, 2018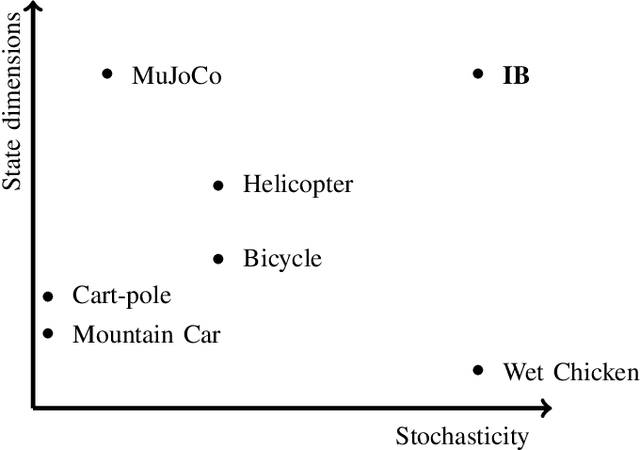
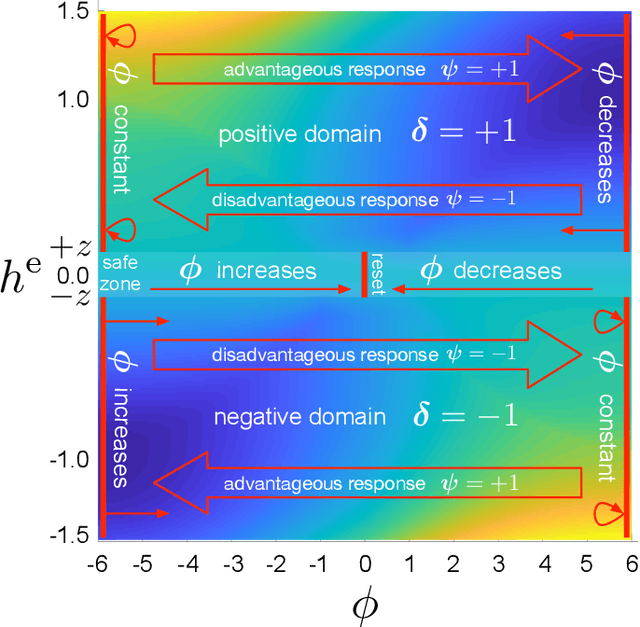
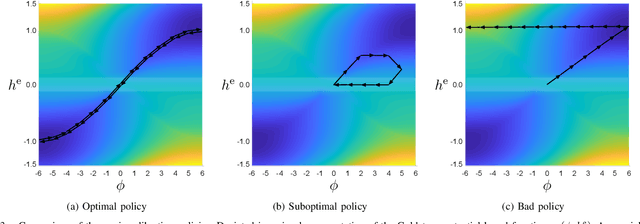
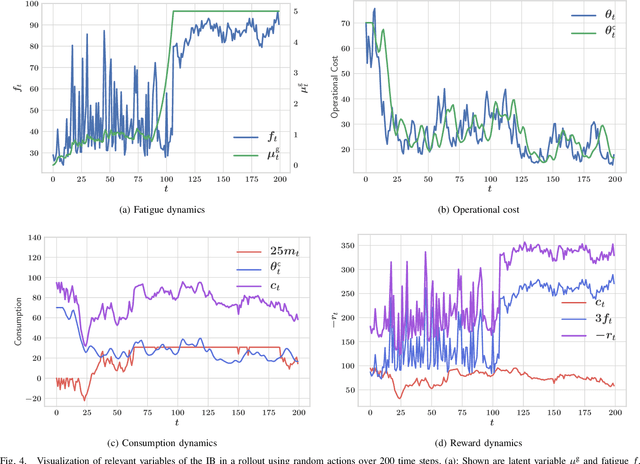
In the research area of reinforcement learning (RL), frequently novel and promising methods are developed and introduced to the RL community. However, although many researchers are keen to apply their methods on real-world problems, implementing such methods in real industry environments often is a frustrating and tedious process. Generally, academic research groups have only limited access to real industrial data and applications. For this reason, new methods are usually developed, evaluated and compared by using artificial software benchmarks. On one hand, these benchmarks are designed to provide interpretable RL training scenarios and detailed insight into the learning process of the method on hand. On the other hand, they usually do not share much similarity with industrial real-world applications. For this reason we used our industry experience to design a benchmark which bridges the gap between freely available, documented, and motivated artificial benchmarks and properties of real industrial problems. The resulting industrial benchmark (IB) has been made publicly available to the RL community by publishing its Java and Python code, including an OpenAI Gym wrapper, on Github. In this paper we motivate and describe in detail the IB's dynamics and identify prototypic experimental settings that capture common situations in real-world industry control problems.
Sensitivity Analysis for Predictive Uncertainty in Bayesian Neural Networks
Dec 10, 2017
We derive a novel sensitivity analysis of input variables for predictive epistemic and aleatoric uncertainty. We use Bayesian neural networks with latent variables as a model class and illustrate the usefulness of our sensitivity analysis on real-world datasets. Our method increases the interpretability of complex black-box probabilistic models.
Uncertainty Decomposition in Bayesian Neural Networks with Latent Variables
Nov 11, 2017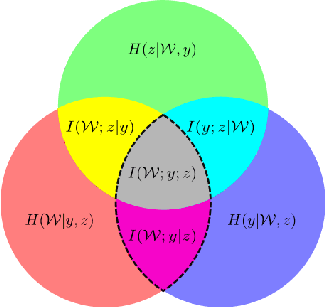
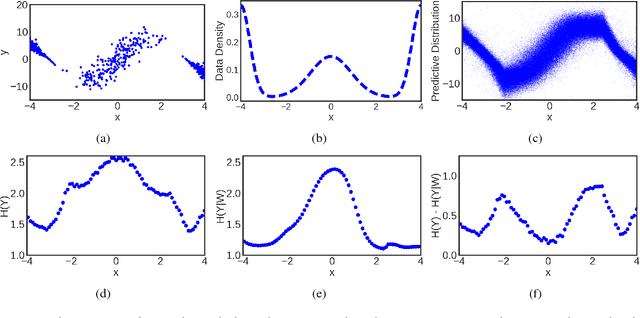
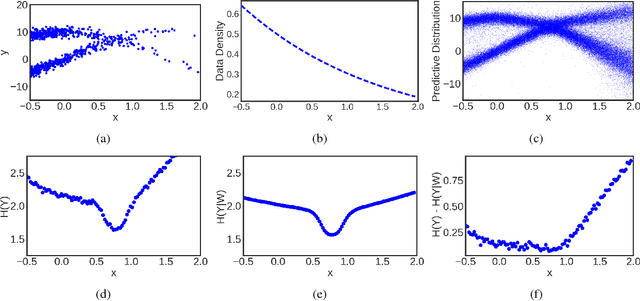
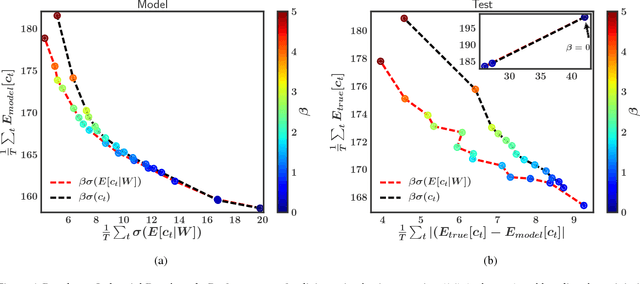
Bayesian neural networks (BNNs) with latent variables are probabilistic models which can automatically identify complex stochastic patterns in the data. We describe and study in these models a decomposition of predictive uncertainty into its epistemic and aleatoric components. First, we show how such a decomposition arises naturally in a Bayesian active learning scenario by following an information theoretic approach. Second, we use a similar decomposition to develop a novel risk sensitive objective for safe reinforcement learning (RL). This objective minimizes the effect of model bias in environments whose stochastic dynamics are described by BNNs with latent variables. Our experiments illustrate the usefulness of the resulting decomposition in active learning and safe RL settings.